【www.zhangdahai.com--教学设计】
 方案主要有2种,一是离心分离式,利用离心运动的离心原理,物体的质量不同,其具有的离心力也不同。预留的种子质量参差不齐,内含有干瘪、腐烂变质、发芽的,其离心力与质量好的种子有一定的差别,利用不同种子具有不同离心力的原理,可将其分离。考虑到离心控制对技术的要求比较高,不易控制,且离心控制必须用到离心分离机,其价格比较昂贵,故该方案不适合。二是风选分离式,利用轻杂及病变种子在质量上明显轻,且尺寸与好种子有明显差别的特点,将不同等级的种子进行分离。其原理是在振动筛的振动作用下,不同等级种子的振动幅度不同,经过风机的吹风作用,不同等级的种子逐渐分离。经过筛选分离后,种子净度已明显提高,且粒度比较均匀。该方案控制简单,成本较低,分离效果明显,在农业机械方面应用广泛,故本设计选择此方案。筛选分离模块通过双层筛网分隔为3层,上层筛面为平面筛,下层筛面为棱面筛,棱面筛的效率要比平面筛效率提高2~3倍。整个模块的振动依靠电机带动曲柄连杆的摇动,使其做有规律的往复运动,从而实现整个筛选分离模块的振动。在进料口下部装有风选装置,由鼓风机等部分构成,PWM调速可以调节风速,可以吹走质量较轻和干瘪的种子。筛选分离部分的振动与风选装置配合工作,能够将不同等级的种子分离开,粒径大的种子通过振动作用经过上层平面筛网过滤掉,从1号出口流出,粒径小的从2号出口流出,质量符合标准的种子从3号出口流出,从而完成种子的筛选分离。可以根据筛选种子的直径大小来更换不同规格的筛网,以满足不同种子的筛选需求。筛网网孔的阻塞直接影响清选效果,针对此问题,在棱面筛网上部加装有与筛网宽度相同的毛刷,电机转轴通过联轴器与丝杠连接,毛刷一端焊接有螺母,长条毛刷与丝杠保持垂直状态。12 V直流电机带动丝杠旋转,间接地使毛刷做有规律的往复运动,保证清选效果。
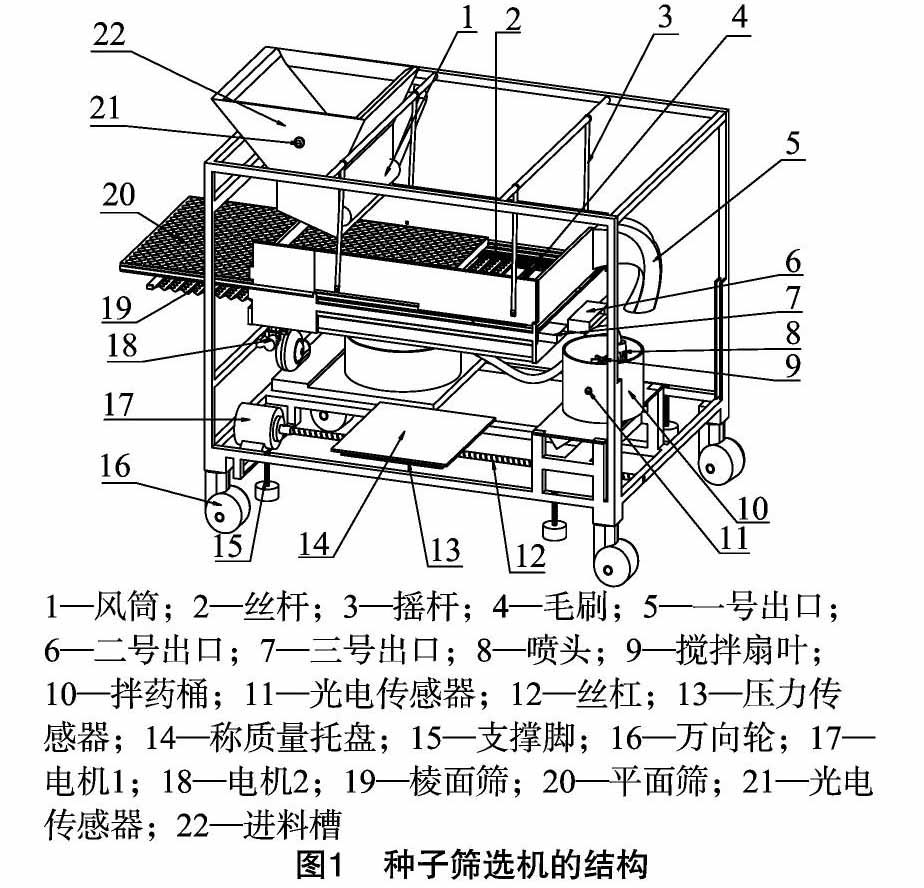
方案主要有2种,一是离心分离式,利用离心运动的离心原理,物体的质量不同,其具有的离心力也不同。预留的种子质量参差不齐,内含有干瘪、腐烂变质、发芽的,其离心力与质量好的种子有一定的差别,利用不同种子具有不同离心力的原理,可将其分离。考虑到离心控制对技术的要求比较高,不易控制,且离心控制必须用到离心分离机,其价格比较昂贵,故该方案不适合。二是风选分离式,利用轻杂及病变种子在质量上明显轻,且尺寸与好种子有明显差别的特点,将不同等级的种子进行分离。其原理是在振动筛的振动作用下,不同等级种子的振动幅度不同,经过风机的吹风作用,不同等级的种子逐渐分离。经过筛选分离后,种子净度已明显提高,且粒度比较均匀。该方案控制简单,成本较低,分离效果明显,在农业机械方面应用广泛,故本设计选择此方案。筛选分离模块通过双层筛网分隔为3层,上层筛面为平面筛,下层筛面为棱面筛,棱面筛的效率要比平面筛效率提高2~3倍。整个模块的振动依靠电机带动曲柄连杆的摇动,使其做有规律的往复运动,从而实现整个筛选分离模块的振动。在进料口下部装有风选装置,由鼓风机等部分构成,PWM调速可以调节风速,可以吹走质量较轻和干瘪的种子。筛选分离部分的振动与风选装置配合工作,能够将不同等级的种子分离开,粒径大的种子通过振动作用经过上层平面筛网过滤掉,从1号出口流出,粒径小的从2号出口流出,质量符合标准的种子从3号出口流出,从而完成种子的筛选分离。可以根据筛选种子的直径大小来更换不同规格的筛网,以满足不同种子的筛选需求。筛网网孔的阻塞直接影响清选效果,针对此问题,在棱面筛网上部加装有与筛网宽度相同的毛刷,电机转轴通过联轴器与丝杠连接,毛刷一端焊接有螺母,长条毛刷与丝杠保持垂直状态。12 V直流电机带动丝杠旋转,间接地使毛刷做有规律的往复运动,保证清选效果。
2.2 筛选理论设计计算
(1) 要求筛子的前部风速达到7~8 m/s,中部达5~6 m/s,后部达1~2 m/s,风扇出风口的平均风速需达4~5 m/s。
(2) 筛子面积计算方面,可由进入筛选装置的种子Qs(kg/s)确定筛的宽度B(mm),在传统型联合收割机上一般为筛体宽度的0.90~0.95,则筛子长度:
2.3 控制模块设计
依靠AVR单片机作为控制中枢,运用光电开关、压力传感器、碰撞开关等传感器件,并与电机、舵机和12864液晶显示屏完美配合,实现人机交互、实时显示等功能。
2.3.1 微处理器的选择 ATmega16是基于增强的AVR RISC结构的低功耗8位CMOS微控制器。由于其先进的指令集以及单时钟周期指令执行时间,ATmega16的数据吞吐率高达1 MIPS/MHz,从而可以缓解系统在功耗和处理速度之间的矛盾。
ATmega16内核具有丰富的指令集和32个通用工作寄存器。所有的寄存器都直接与运算逻辑单元(ALU)相连接,使得一条指令可以在1个时钟周期内同时访问2个独立的寄存器。这种结构大大提高了代码效率,并且具有比普通的CISC 微控制器最高至10倍的数据吞吐率[3]。
2.3.2 检测模块的选择 为保证工作的准确性,必须保证数据的连续传输,要求传感器有效信号传输距离为5~25 cm,传输信号准确,反应快,最终确定选用E3F-DS30C4型光电传感器。当光电传感器监测到拌药桶内的种子达到一定量时,反馈信号给单片机,单片机作出相应的响应(表1)。
HX711是一款专为高精度称质量传感器而设计的24位A/D 转换器芯片。与同类型其他芯片相比,该芯片集成了包括稳压电源、片内时钟振荡器等其他同类型芯片所需要的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。降低了电子秤的整机成本,提高了整机的性能和可靠性。
该芯片与后端MCU芯片的接口和编程非常简单,所有控制信号由管脚驱动,无需对芯片内部的寄存器编程。输入选择开关可任意选取通道A或通道B,与其内部的低噪声可编程放大器相连。芯片内的时钟振荡器不需要任何外接器件。上电自动复位功能简化了开机的初始化过程(图2)。
2.3.3 舵机模块P MG995型舵机工作稳定,体积小,扭力大,功耗低,控制精确[4]。
舵机在该装置中的使用主要是控制角度的变换,以实现拌药桶底部开口开合的变换。
2.3.4 继电器的选择 在低电压控制高电压的结构中采用电磁式继电器,由铁芯、线圈、衔铁、触点簧片等组成。只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力下返回原来的位置,使动触点与原来的静触点(常闭触点)释放(图3、图4)。
3 结论
智能种子筛选机主要针对个体型农户设计,也可应用于小型工厂。传统型手工作业费时费力,效率低。该产品的设计集种子筛选分离、拌药、称质量于一体。跟传统筛选机相比,本筛选机具有以下优点:(1)流速控制功能,保证筛选过程中进料的均匀性,从而保证筛选质量。(2)双层筛网过滤,上筛面为平面筛,下筛面为棱面筛的设计,更换方便,筛选效果明显。(3)在搅拌桶内有搅拌扇叶,桶的上部装有智能化喷头,能够控制进药量,能够对筛选出的质量符合标准的种子进行拌药,效率高,搅拌更均匀。(4)称质量托盘底部装有压力传感器,可以对装袋质量实时监测,达到预设质量时自动报警。(5)单片机作为控制中枢,与传感器件交互配合,实现智能控制。独特的机械结构与电气控制部分交互配合,智能高效,简单易操作,可以满足不同种类种子加工处理需求,具有广阔的应用前景。
参考文献:
[1]邹必昌,彭三河,汤小凝. 谷物清选机构主要参数优化设计试验研究[J]. 湖北农学院学报,2003,23(2):108-112.
[2]马继光. 国外重力式清选机的发展方向[J]. 世界农业,2001(7):32-33.
[3]徐益民,范红刚,苏凤武. 零基础学AVR单片机[M]. 北京:机械工业出版社,2011:85-115.
[4]宗华光,杨 洋,唐伯雁译. 机器人控制电子学[M]. 北京:科学出版社,2004:41-50.
本文来源:http://www.zhangdahai.com/jiaoxueziyuan/jiaoxuesheji/2023/0409/581935.html



