【www.zhangdahai.com--其他范文】
张坤之 张乃峰
(聊城鑫泰机床有限公司,聊城 252023)
通过对比近年人口普查数据发现,我国老龄化进程明显加快[1],其中出行困难成为老年人的一大难题。所以,研究一款新型多功能爬楼辅助手杖,成为满足行动不便的人的生活需求的重要课题。
现在的手杖设计功能简单,不能很好地保证老年人的出行安全。基于现有产品模型及功能,设计了一款智能爬楼及登高辅助训练用的手杖,能够更好地帮助老年人及腿部受伤患者出行。该设计利用机械结构将手杖固定在楼梯扶手上,通过机械结构实现自锁来辅助使用者上楼。此外,手杖搭载单片机为主控芯片,利用全球定位系统(Global Positioning System,GPS),能够实时定位使用者的位置,实现功能的多样化。
在我国,赵昊琳通过SolidWorks建模并仿真爬楼车的运动轨迹,通过在爬楼车底座设计多个支点,解决了上下楼时存在的不平衡问题[2]。周艳萍阐述了如何选择登山杖,实验表明平地时手杖的高度为使用者身高的0.66倍效果最佳[3]。在国外,英国设计师AMOS发明了Stairsteady(稳稳的楼梯),由固定的栏杆和可移动的手柄组成。AMOS的设计主要考虑了英国老式住宅的楼道比较狭窄,不能做成座椅爬楼机的样式,对空间要求高,而且设备成本高。
设计的手杖可以方便使用者的家人随时掌握使用者的位置,避免发生紧急事故[4-5]。
3.1 原理概述
运用人机工程学设计手杖手柄部分,结合机械原理和机械设计曲柄滑块结构等原理,设计手杖底部和杆部的机械结构,加装微控制单元(Micro-Controller Unit,MCU)单片机最小系统、GPS模块及电动推杆等电子元器件。
3.2 整体设计
智能手杖的基本组成包括手杖手柄部分、手杖杆部和手杖底部3大部分。其中:手杖手柄部分含有前照灯;
手杖杆部含有电子元件、电动开关、伸缩卡扣及电动推杆等;
手杖底部含有曲柄滑块结构、升降杆及支撑腿等,如图1所示。

图1 手杖整体装配图
手杖设计的最大亮点在于手杖底部采用雨伞设计原理,通过安装在手杖中的电动推杆来控制升降杆的上升下降,进而带动曲柄滑块机构进行夹紧与扩张。
当使用者在进行上楼运动时,可以通过推杆电动开关来控制电动推杆的伸缩运动。电动推杆伸长时可夹紧楼梯扶手,使用者双手握住手杖杆部完成上楼运动。同时,使用者可以按动手杖杆部的伸缩卡扣,缩短手杖整体长度,方便其在狭窄的楼道内使用。上楼过程演示图,如图2所示。
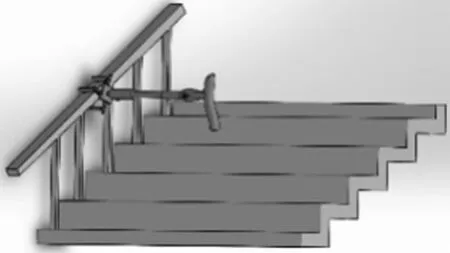
图2 手杖使用演示图
当使用者在平地上使用时,该手杖采用的四腿支撑结构保证了使用时运动的平稳性,可防止使用者摔倒。当使用者在照明不良的狭窄楼道时,可以开启手杖手柄部分的前照灯进行照明。同时,手杖内部加装GPS定位元件,以便使用者出行突然发生记忆模糊、迷路等问题时,家人可迅速定位其位置。
3.3 手杖底部的设计
手杖底部的设计采用了四角支撑结构,在使用过程中4个支点同时受力,受力面积大,各角点的平均受力适中,所以结构非常稳定。使用者在不平整的路面上使用时,也可以保证手杖的平衡性防止摔倒,如图3所示。

图3 手杖底部整体装配图
手杖底部设计了4个曲柄滑块结构与四角上的支撑腿、手杖杆部的电动推杆和升降杆的相互配合运动。滑块与滑杆通过销轴连接。滑块与滑轨通过卡槽连接进行滑动。使用者在按动正转推杆开关时,电动推杆中电动机产生正转运动,从而推动升降杆伸长,如图4所示。4个腿上的滑块沿着滑轨向内收缩,可以夹紧楼梯扶手。当正转按钮断电时,电动推杆停止运行,处于上电状态产生自锁,此时使用者双手抓住手杖杆部,借力上楼。相反,当使用者手动按动反转推杆开关按钮时,手杖杆部的升降杆缩短,4个腿的滑块向外扩张,升降杆缩短,如图5所示。松开楼梯扶手,使用者此时可以沿着楼梯扶手向上推动手杖至新的位置。重复以上动作,完成借力上楼。该设计不仅可以给老年人带来便利,也可以用于腿部受伤行动不便的患者的康复训练[6]。
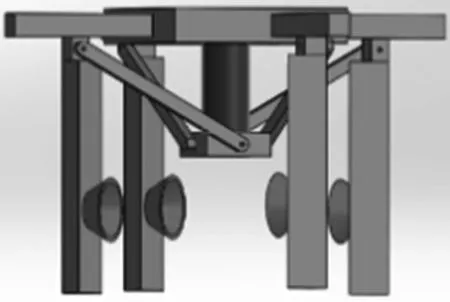
图4 升降杆伸长示意图
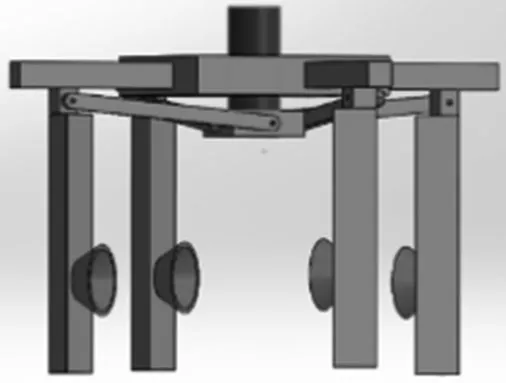
图5 升降杆缩短示意图
4.1 关键部件的有限元分析
设计通过SolidWorks Simulation进行手杖底部装配体的受力分析,具体步骤如下。
(1)在SolidWorks插件目录中找到Simulation并运行Simulation插件,启动后点击运行新算例。
(2)在工具栏中选择应用材料选项。本设计采用普通碳钢作为手杖底部材料,具体数据如表1所示。
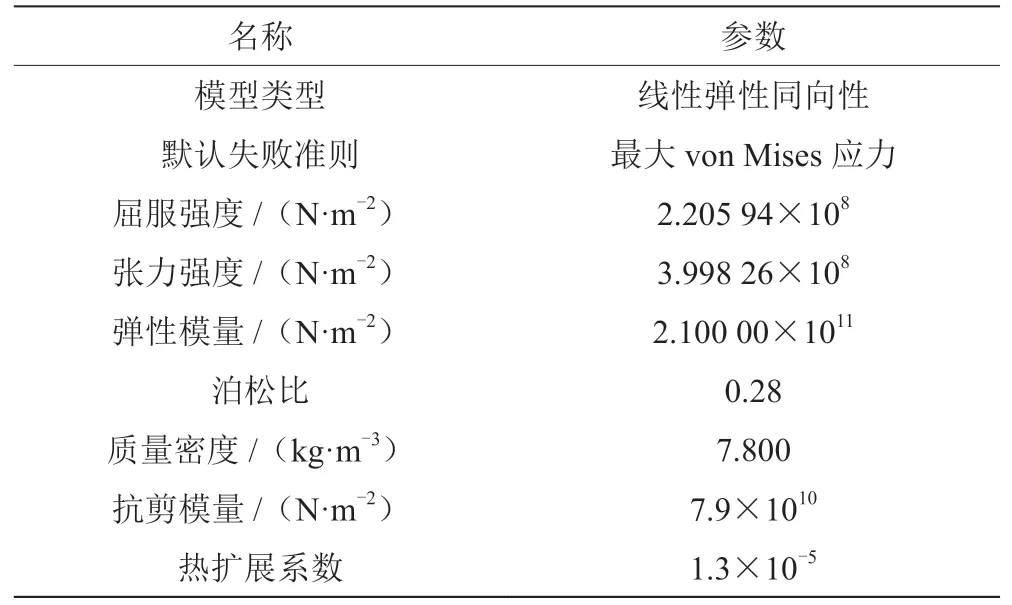
表1 普通碳钢材料的具体数据
(3)选择固定夹具。只需要将手杖底部的底座与4个滑轨固定即可。
(4)定义外部载荷。
(5)划分网格。
为了更好地分析手杖底部的处理过程,上楼过程的简化受力图如图6所示。其中,G为重力,F为所用的拉力,f为摩擦力,FN为支持力。

图6 上楼受力分析图
其中,规定人体质量为m、加速度为g,F的大小等于G沿斜面向下的分力加上f,有

式中:质量m为60 kg;
楼梯角度为30°;
摩擦系数为0.2;
重力加速度g为9.8 m·s-2。将上述数值代入式(1),可计算获得F约为400 N。
本次设计的屈服极限σs为220.6 MPa,最大应力为170.3 MPa,最小应力为3.037×10-9MPa,安全系数为1.3,说明此设计满足要求。此外,最大位移为0.2 mm, 最大应变ε约为4.3×10-4,而普通碳钢的弹性模量E为2.1×105N·mm-2。根据E=σ/ε可知,设计满足刚度要求。
4.2 系统整体评价
设计的手杖的主要尺寸如图7所示,全长为91 cm, 符合老年使用者的身体高度。手杖杆部采用伸缩卡扣设计,可以缩短手杖杆部以适应使用者的身体高度。手杖将MOTEC的AM60电动推杆安装到手杖杆部的下端,以满足电动推杆的尺寸要求。
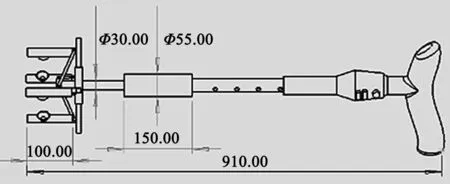
图7 手杖主要尺寸(单位:mm)
本次设计采用6061铝型材、普通碳钢以及轻型ABS塑料为原料,成本大约在150元,造价适中,易被大众接受。手杖整体质量约为1.94 kg,轻便稳固,使用者可轻松提起。手杖底部采用四角抓地结构,平稳支撑设计增加底座的稳固性,不易打滑,可保障使用者的出行安全。手杖手柄部分采用的轻型ABS塑料材质,选用上乘的三元共聚物原料,符合ISO9001标准。通过以上选材和静应力分析可知,设计的手杖寿命长,耐磨性好,适合反复使用。
文章提出一种新型智能手杖的设计结构,使得使用者可以自行出行,轻松上下楼。监护人及家属可以随时对使用者进行定位,满足了适用人群的出行需求,可更好地保证使用者的人身安全。
猜你喜欢 爬楼推杆手杖 不同力装置布局的双层剪叉式升降平台的比较分析闽江学院学报(2021年5期)2021-11-19火工分离推杆分离特性研究兵器装备工程学报(2020年12期)2021-01-12不倒翁手杖决策探索(2019年1期)2019-03-19爬楼摄影 爱上城市之巅大众摄影(2018年7期)2018-07-05步步惊心——“爬楼族”青岛画报(2018年1期)2018-02-23高空挑战造成伤亡,谁担责方圆(2017年24期)2018-01-17组装机科技创新导报(2016年4期)2016-11-19手杖3小雪花·成长指南(2015年8期)2015-08-11手杖2小雪花·成长指南(2015年8期)2015-08-11手杖1小雪花·成长指南(2015年8期)2015-08-11本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0604/606891.html



