【www.zhangdahai.com--其他范文】
杨登九
(山西潞安集团蒲县黑龙关煤业有限公司,山西 蒲县 041204)
随着煤炭资源需求量的不断增加,巷道掘进工作量越来越大,锚杆锚索使用量也不断攀升[1]。相关研究显示,当前我国巷道支护使用的锚杆数量每年就高达千万根以上,其锚固质量是否可靠,不仅关系着井下作业人员安全,还与煤炭企业的经济效益息息相关,因此,锚杆检测至关重要[2-3]。无损检测技术的兴起,在各行各业得到了广泛的应用,其具有快速、准确、安全等优点,倍受青睐[4]。近些年来在无损检测技术上快速发展并应用的应力波法,在锚杆长度检测过程中具有很好的应用前景,而且需要配套控制系统才能实现无损检测的目的。因此针对目前应力波法缺乏无损检测系统的现状,设计开发一套无损检测系统,对于提高锚杆长度无损检测效率和准确度具有重要意义。
根据应力波法检测系统的需求,完成了无损检测系统总体方案的设计,如图1所示。由图1可以看出,系统主要由主控部分、应力波采集部分、数据处理分析部分、电源等组成。主控部分完成各个子部分协调控制,实现应力波采集、传输和处理功能;
电源主要工作是为芯片和模块提供工作电源;
应力波采集模块用于驱动加速度传感器,完成信号的采集、处理和数模转换等工作;
数据处理和传输部分主要负责加速度信号的处理和实时传输,确保主控部分获取准确的加速度信号,同时,将准确的信号传输至上位机实时显示;
上位机对应力波信号进行处理与显示,并且对数据进行归档存储。

图1 检测系统总体方案
2.1 FPGA模块
检测系统中的核心芯片采用了型号为EP2C8Q208C8的FPGA,其具有135个最高频率达175 MHz的管脚、具备8 256个逻辑单元以及36 kB容量的9 bit的RAM。相关数据显示,FPGA处理器主要支持并行处理运算,配置的IP核供不同用户使用,时间控制和数据运算功能极强。FPGA芯片使用时,先接收A/D模块的时间与对应的数据,同时具备与A/D模块之间的数据收发和控制功能。
2.2 DSP模块
系统中的DSP模块的作用主要是接收和处理FPGA芯片接收的应力波数据,能够处理的应力波数据需要经过EMIF处理,完成数据收集与预处理。DSP模块采用自己的电源单独供电,配置晶振电路采集时钟基准。历史数据的存储采用SDRAM芯片完成,配合FLASH电路使用,避免掉电之后数据丢失。处理完成之后的应力波数据,经EMIF接口传输至FPGA芯片。系统DSP处理器的型号为TMS320V5509A,最突出的性能是低功耗,最高处理频率高达200 MHz,具有极强的数据计算能力,满足应力波数据处理的要求。DSP模块原理框图如下页图2所示。
2.3 传感器选型
传感器作为无损检测系统功能得以实现的重要组件,其选型工作至关重要。此处选择了型号为LC01-53T的传感器,生产于朗斯公司,由压电元件和结构件两部分组成,内部集成有微型运放和加速度传感器,使用时外接电路极为简单,以此保证了数据采集的准确度。
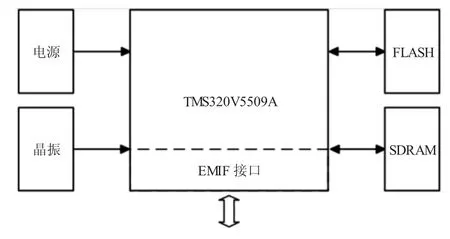
图2 DSP模块原理框图
与此同时,该传感器共用自己的信号线和供电线,降低了传感器工作过程中强电干扰弱电的强度,也大大提高了传感器的抗噪声能力和数据采集的稳定性。传感器工作原理如图3所示。

图3 传感器工作原理
3.1 主程序设计
根据无损检测系统功能要求及硬件结构,完成了系统软件主程序设计工作,如图4所示。由图4可以看出,系统启动之后首先完成各个模块系统的初始化,使能状态时,ARM会释放FPGA的复位引脚,同时启动A/D数模转换模块进行数据的采集,转换之后存入FIFO1当中;
之后系统自动判断存入FIFO1当中的数据深度是否达到设定数值N,若已经达到设定数值N便开始读出数据,否则一直等待存入数据;
系统工作时还会实时存储FIFO1接收数据的幅值,当幅值数值达到了预触发设定值Y时,FIFO2开始存入FIFO1数据,此时存入FIFO2的数据就是触发点之前的第N个数据;
之后判断存入FIFO2的数据深度是否达到预设值M,当存入的数据达到了预设值M时,FIFO2开始读出数据,并通过中断通知DSP由EMIF接口接收数据并存储在SDRAM中;
接收完数据之后,由DSP芯片开展应力波数据的运算处理,数据处理完成通知FPGA芯片启动DSP与ARM芯片的数据接口,经FIFO3完成数据传输;
最后系统判断数据是否传输结束,数据传输完成ARM将会复位FPGA芯片,将数据存储并显示,至此完成一次完整的应力波数据采集流程。

图4 系统主程序流程图
3.2 ADS8422芯片驱动
检测系统中的ADS8422芯片主要承担着加速度传感器采集信号的数模转换任务,工作时由FPGA芯片进行驱动时序控制,之后将转换后的数据存入FPGA预触发模块。ADS8422芯片作业流程如图5所示。由图5可以看出,ADS8422芯片驱动工作的出发点是进行时序控制与数据输出。初始化引脚配置,确定A/D模块的数据转换模式和转换方式;
设置满足DATASHEET要求的CSN、RDN、CONVSTN信号,之后启动A/D模块进行数据转换,最后输出转换完成的数据。

图5 ADS8422芯片驱动流程
3.3 DSP软件
DSP模块作为无损检测系统的重要组成部分,承担着应力波数据A/D采集数据的预处理,负责数据的接收和发送、数字滤波器设计、内部驱动的设计与实现等。为了滤除应力波信号中的高频噪声,应用了数字滤波器,增强信噪比,避免信号失真。DSP模块工作流程如下页图6所示。
由图6可以看出,DSP模块启动之后首先初始化内部驱动、外部硬件和接口,之后进行内部软件数据和变量的初始化,完成初始化工作之后,DSP处于等待状态,没有外部触发和内部指令时工作在低功耗模式,一旦接收到FPGA芯片接收数据的指令时,DSP即刻进入中断模式,接收FPGA芯片传送过来的数据,数据接收完之后,DSP模块进行FIR低通滤波器运算;
数据处理完毕,由FPGA芯片和ARM将其传输至ARM,数据传输完成,DSP模块再次进入低功耗模式。

图6 DSP模块工作流程
为了验证基于应力波法的锚杆长度无损检测系统设计的合理性和可行性,将其在某煤炭掘进巷道进行试验测试,开展了4组试验,进行数据统计,结果如表1所示。由表1中的数据可以看出,系统检测数据较为准确,锚杆原始长度与实测锚杆长度基本一致,计算得出二者之间的误差均在3%范围之内。无损检测系统检测具有较高的检查精度,取得了很好的应用效果。

表1 试验检测数据统计结果
锚杆作为煤炭企业巷道支护过程中重要的结构件,其质量好坏直接关系着巷道内部人员和设备的安全问题,必须引起高度重视。针对目前应力波法缺乏无损检测系统的现状,设计开发了一套无损检测系统。应用结果显示,无损检测系统在锚杆长度检测过程中具有较好的精度,误差能够保持在3%范围之内,满足锚杆长度质量检测的要求,对锚杆锚固检测效果提升具有重要的促进作用。
猜你喜欢 锚杆长度芯片 芯片会议环球时报(2022-09-29)2022-09-29基于桩结构单元的锚杆支护数值计算研究煤矿安全(2021年11期)2021-11-23人体微芯片发明与创新(2021年17期)2021-07-05关于射频前端芯片研发与管理模式的思考军民两用技术与产品(2021年12期)2021-03-09绳子的长度怎么算小学生学习指导(低年级)(2020年10期)2020-11-261米的长度数学小灵通(1-2年级)(2020年9期)2020-10-27浮煤对锚杆预紧力矩的影响煤(2020年5期)2020-06-01锚杆参数对围岩支护强度的影响西部资源(2017年5期)2018-02-23爱的长度作文大王·低年级(2017年11期)2017-12-05长度单位学苑创造·A版(2017年1期)2017-01-19本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0713/624856.html



