【www.zhangdahai.com--其他范文】
温向华,范海霞,赵 江
(1.国营长虹机械厂,广西 桂林 541002; 2.驻桂林地区军事代表室,广西 桂林 541002)
多型航空飞行器采用气动舵机驱动舵面完成姿态的调整。气动舵机的工作方式是在有高压气体的情况下将来自航空飞行器控制系统的控制信号按设计的比例放大成为舵面的舵偏角[1],根据舵偏角航空飞行器实现在空气作为负载的状态下姿态调整。使用模拟空气负载的负载模拟器可以模拟航空飞行器在飞行过程中气动舵机所受的力矩负载或力负载[2],因此带负载模拟器的测试平台是气动舵机设计生产厂家检验、验收[5]气动舵机性能的重要设备。
国内外均有技术人员对舵机的测试方法或测试平台进行过研究,国外如Tae-young Chun等人设计了由一个电机和编码器组成的气动负载模拟器[3],并由仿真结果验证了所设计的气动负载模拟器性能,但只针对负载模拟器进行研究,并没有论述控制计算等方法;
I Norinskaya等人研制了一种航空弹药舵机旋转运动负载转向装置[4],对转向装置各部件设计参数进行了计算,得到了转向装置的动态特性,但只针对负载转向装置进行研究,同样没有论述控制计算等方法。国内如牛海发等人研制了基于虚拟仪器的舵机测试系统[8],该系统较为成熟,但系统只针对电动舵机,不能实现气动舵机的测试;
尉建利等人研制了直线舵机加载测试系统[5],能完成直线舵机的性能测试,但系统只包含了部分性能测试,相频特性、幅频特性、极性特性、最大位移等参数均未涉及;
鲁晓丽提出一种线性舵机测试方法[6],但是对于非线性严重的气动舵机测试方法并未提及。一般的气动舵机测试系统能依据舵机所接收的各种控制信号及所受的力矩负载或力负载情况,完成舵机零位导通、动作死区、极性测试等细化性能指标的测试,其中反映舵机响应速度的频率特性最为复杂,尤其是非线性严重的气动舵机。在舵机的测试中,频率特性测试一般包含相频特性、幅频特性,其基本方法取决于测试信号,早期采用正弦波点频测量,随后出现了伪二进制随机信号[7]的广谱信号测量,继而出现正弦波扫频测量,如何采用正弦波扫频测量频率特性将是测试平台重点解决的问题。
为实现多种型号气动舵机的性能测试,气动舵机通用测试平台采用了电机、扭簧两种形式的加载装置作为加载台,通过舵机与摇臂之间对应运动关系计算所需的几何数据,从而进一步推导出加载台推杆机构传动方式,解决了加载台主要参数指标的设计。加载台与被测试气动舵机均由测控系统进行统一指令发送与接收控制,通过一系列的一级二级电源控制、信号采集激励、信号调理等措施后,实现了舵机极性、传输速度、频率特性等性能指标的测试,特别是在软件编程上采用了单个正弦波扫频测量算法,解决了舵机频率特性测试的重点问题。
为投入生产使用后的可维修性及可扩展性,综合测试平台采用“标准化、通用化、系列化”三化的设计模式进行硬件选择[8]。测试平台框图如图1所示,由气动舵机加载台、测控系统、气源系统共三大模块组成。测控系统主要由主控计算机、信号调理箱、软件、电控组合箱等组成。气动舵机加载台主要由电机加载装置、扭簧加载装置组成。主控计算机是整个测控系统的核心,是控制流程、数据库管理[9]等软件的承载体,完成气动舵机加载台的信号交换、气源系统气源出气量调节、气动舵机PWM信号的输出控制及反馈采集等功能。

图1 气动舵机通用测试平台框图
测试时用户将被测舵机安装在气动舵机加载台上,打开测控系统主控计算机,进入编制的软件测试程序中,选择相应的测试性能参数后测试平台开始自动测试。先是软件控制电控组合箱内电源板对舵机、气源系统等进行供电,按照软件指令由计算机控制打开气源系统继电器开关,气动舵机开始供气后处于等待状态。软件根据用户选择的性能参数由主控计算机PCI板卡发出相应的驱动信号经调理箱AD调理板、PWM调理板等提供舵机作为信号输入。舵机按照信号驱动动作后反馈给信号调理箱DA调理板、开关量板等再次进入主控计算机作为后台数据处理的对象。采集到的数据经过单个正弦波扫频等多重计算得到结果后显示给用户,实现了用户一键式操作,简单方便。
2.1 加载台总体设计
气动舵机加载台能模拟航空飞行器在实际飞行过程中舵面所受的空气动力矩[10]。台体采用框架结构,加载台上层安装电机加载装置、扭簧加载装置、阀门开关、压力表等。测试台体台面上安装带有T形槽的基座,加载装置和舵机夹具可以通过T形槽[11]调整位置以适应不同型号的气动舵机。测试台体上安装电机加载、扭簧加载两种不同的加载装置,可同时对两种舵机进行测试。每个加载装置的输出轴上,安装有用以调校传感器的调校盘,以满足扭矩传感器和扭簧的计量检定要求。每个加载装置安装在各自的基座上,可有效保证加载装置轴系零件的装配同轴度。气动舵机加载台体如图2所示。

图2 气动舵机加载台
电机加载装置是由作为驱动部件的伺服电机、传动轴、执行部件、扭矩传感器及角度编码器组成,部件连接如图3所示。扭簧加载装置由角位移传感器、扭簧和安装台面组成,通过调节有效长度来调节弹性系数,部件连接如图4所示。

图3 电机加载装置

图4 扭簧加载装置
在给气动舵机做试验时,用扭簧加载装置上的扭簧(或电机加载装置上的伺服电机)给舵机加负载。舵机的控制信号越大,其输出转角越大,扭转后产生的反力矩(加载力矩)也越大,因此扭簧(伺服电机)模拟了舵面受到的气动力矩。
2.2 传动设计
测试台加载装置传动机构的作用是将气动舵机活塞沿直线方向的运动转化成曲柄的摆动,要求传动机构实现舵机活塞正负行程与曲柄正负摆角的一一对应关系,为此设计了推杆机构传动方式。
推杆机构由舵机活塞杆直接驱动摇臂进行摆动,在运动过程中,舵机会有一定范围的摆角,所以需要将舵机和基座铰接或者将舵机活塞杆铰接,详见图5。推杆机构如图6推杆机构示意图所示,设摇臂长为a,摆角为α,气动舵机的行程为x、舵机活塞杆的末端到铰链轴的距离为b。

图5 推杆机构三维立体造型图

图6 推杆机构示意图
由推杆机构运动几何关系,可得以下方程:

化简得:x=a·sinα
(1)
这是实现舵机和摇臂之间的对应运动关系所需满足的几何关系。可以发现推杆机构的摇臂长度a与舵机的行程x以及摇臂摆角α直接满足确定的数学关系,可以更精确地实现摆角和行程之间的对应关系。所以最终采用推杆机构作为测试台的传动机构。同时发现式(1)与舵机活塞杆的末端到铰链轴的距离b无关,所以在设计过程中可以灵活调整b的值。
根据气动舵机的技术参数其最大行程x=±25 mm,最大输出力F=1 900 N,设计的最大摇臂摆角α=19.5°,由式(1)得到:
摇臂设计长度a=75 mm,
力矩M=142.5 Nm,
扭簧刚度E=419.12 N·m/rad。
扭簧加载装置扭簧的截面形状见图7,正方形边长为m的扭簧极惯性矩Ip=0.141 m4,则扭簧有效长度为:
L=IpG/E
(2)
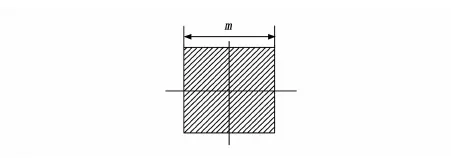
图7 扭簧的截面形状
根据扭簧材料参数取G=76 000 MPa,m=12 mm,由式(2)可得针对舵机的扭簧最小长度L=0.53 m。加载台相关设计参数见表1。

表1 加载台相关设计参数
2.3 加载台关键零件设计
加载台其他关键的零件设计如扭矩传感器、编码器、电机、联轴器等选型及主要参数见表2。

表2 测试台轴其它零件参数表
气动舵机测试平台的测控系统是实现计算机控制的数据管理、参数设定、故障定位、控制算法及数据采集等功能。主控计算机产生控制指令后通过相应的驱动电路驱动舵机系统工作,扭矩传感器等敏感到舵机拉动的扭矩等信息经过信号调理后进入数据采集卡,由数据采集卡实现A/D、D/A转换等功能。
3.1 主控计算机
主控计算机采用加固型工业用工控机。为实现友好交互界面,以WINDOWS 2000操作平台为基础进行软件编程,通过软件向待测气动舵机发送相关的控制指令,从而实现测试过程中各类数据的设定与测试过程的控制,同时对测试过程中的数据进行处理计算、显示、存储。测控系统选择台湾研华工控机IPC-610MB作为核心处理单元,来完成测控系统的信号采集、算法实现、记录实验数据、报表输出等任务。PCI插槽工控机内插研华多功能卡,其中包括有模拟量输入板卡,模拟量输出板卡、数字量输入板卡、数字量输出板卡及PWM运动控制卡。具体板卡选型及说明见表3。

表3 板卡选型说明
3.2 电控组合箱
因受控电压源输出电流较大,单一的继电器控制方式不能满足要求。电控组合箱中采用了直流继电器和交流接触器的二级控电方式。为避免AC220V市电对电组合控箱内电路造成电磁干扰,AC220V市电输入端加装了相应的滤波器进行滤波。二级电控组合箱原理如图8。
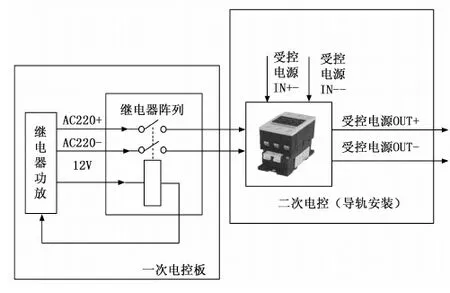
图8 二级电控箱原理图
3.2.1 一次电控板设计
舵机供电电源包括:2路激励信号±12 V、若干电源±15 V、±27 V、2路电磁离合器±6.3 V。考虑冗余,确定为32通道。一次电控板共两块,采用堆叠式安装,每块设计有16通道控制通道。一次电控板中继电器采用固态继电器,输入(3.5~32 V)DC输出(1~150 V)DC,25 A。
3.2.2 二次电控板设计
二次电控部分采用正泰CJX2-2510型交流接触器,线圈电压:AC 220/380 V;
输出电流:25 A。
3.2.3 电流、电压监视
舵机供电电流监视使用华智兴远的电压、电流传感器输出4~20 mA电流,分成两路,一路由板卡采集,一路传至数显表。
3.3 信号调理箱
信号调理箱主要实现隔离、滤波、放大等功能,是测控系统、气源系统、气动舵机、加载台的信号变换中介,一方面将被测信号如转动扭矩传感器信号、舵机位置反馈信号调理到适合AD采集的范围内;
另一方面将舵机激励信号放大,作为舵机的驱动输出。图9为信号调理箱的信号流向。

图9 信号调理箱信号流图
为完成电控制信号的调理和驱动,同时互不干扰,通道间信号调理具备独立性。信号调理箱在底板基础上安装各自通道信号调理子板及其显示的四块电路子板, 如图10所示。

图10 信号调理箱内部框架图
3.3.1 AD调理板
AD调理板将舵机被测信号和传感器输出信号调理为可供工控机与下位机接收的电压信号。AD调理板采用2组±15 V电源,分别用于隔离前、隔离后供电,接插件使用6Pin绿端子;
信号输入、输出均采用96芯弯针焊板欧插。电流信号进入调理板后首先经精密电阻调整为满量程为±5 V电压信号,输入的原始电压信号则经过电阻分压网络将满量程分压至±5 V,然后经过隔离运放AD124、低通滤波器、AD620放大,然后至分流板将其分别送给上位机与下位机采集。AD调理板原理图见图11。
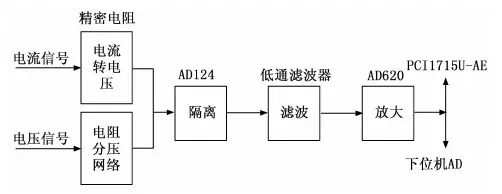
图11 AD调理板设计原理
3.3.2 DA调理板
DA调理板提供舵机需要的电压信号和电流信号,同时提供伺服电机的力矩控制信号。DA调理板的供电电压同样包括2组±15 V电源,实现输入输出隔离。接插件为6Pin绿端子;
输入输出共用1个64芯弯针焊板欧插。电流输出设计为±250 mA,电压输出为±10 V。
电流源设计原理如图12所示。该电路利用一个电流检测放大器(MAX472)和一个低压差线性稳压器(MAX603)产生一个可调节的电流源,控制电压可以来自一个独立的D/A转换器产生的数控电压。要设置0 mA至250 mA之间特定的稳定IOUT值,可在ICONTROL处加0 V至5 V的电压:0 V设置IOUT = 250 mA,5 V设置IOUT=0 mA。电流源的极性可以依靠小型高速继电器切换。电压源使用AD124隔离后,用AD547作为电压的最终输出控制。

图12 250 mA电流源设计原理图
3.3.3 开关量电路板
开关量电路板的控制信号来自于工控机的DO输出,DO信号进入开关量板,经过TLP113光耦隔离后,使用ULN2804来驱动继电器输出电磁阀、离合器等需要的开关控制电压。
电磁阀、离合器的控制电压为6.3 V、27 V等,控制电压接插件选用8Pin绿端子;
板用电压12 V,2Pin绿端子输入,TLP113使用的5 V电压由电压转换芯片获得;
继电器输出采用接插件SCSI68。实现原理见图13。

图13 开关量输出板实现原理
3.3.4 分流板
分流板可将AD调理板调理后的信号分流,一路作为反馈送至下位机,供下位机产生加载控制信号;
另一路输出到工控机的PCI-1715U-AE采集卡,作为工控机的测试信号采集源。分流板输入采用64芯欧插,输出为2个64芯欧插。
3.3.5 PWM信号产生电路
PWM信号共需16路,由两块PCI-1715U-AE运动控制板卡(每块具有8路TTL)输出PWM信号,使用光耦隔离器件TLP113隔离后,通过MOS管控制舵机PWM驱动输出。设计原理见图14。

图14 PWM信号产生电路设计原理图
气源系统为舵机提供动力能源,主要是气动舵机的气源。根据多种型号航空飞行器气动舵机的供气压力,气源系统调节装置应能实现0~16 MPa之间任意可调。在平台使用过程中,能对工业现场不同压力的气源进行调节。为确保压力波动满足驱动舵机和加载的要求,采用先增压再减压的稳定调压方式,以满足不同型号气动舵机工作所需的气压。气源系统工作原理见图15。

1:气源;
2:单向阀;
3:气增压泵;
4:压力开关;
5:气罐;
6:压力表;
7:安全阀;
8:空气过滤器;
9:油雾器;
10:减压阀;
11:压力表。图15 气源系统工作原理
5.1 软件设计思想
舵机测控系统软件采用NI公司的虚拟编程工具LABVIEW进行开发。LABVIEW是面向计算机测控领域虚拟仪器软件开发平台,是以ANSIC为核心的交互式虚拟仪器开发环境,它将功能强大的C语言和测控技术有机结合,具有灵活的编程方法和丰富的函数库[12],为建立舵机自动测试、数据采集提供了理想的软件开发环境。
舵机测控系统软件设计吸收当前先进的测控程序设计思想[13],根据舵机性能测试需求、使用要求及特点等来完成舵机测控系统软件设计。测控系统软件架构包括硬件管理、软件设置、测试流程、数据记录、人机交互等五大模块(见图16),能实现实验数据复现、打印实验报表等功能[14]。设计过程面向任务对象模块化,将舵机测试软件系统的各个功能部分按模块化细分,采用消息、事件驱动控制,通过封装子模块功能,使数据管理和显示达到同步、协调有序。根据试实验数据管理需求,采用统一的数据记录方式,完成绘图、统计、生成报告等操作处理,提供丰富的统计信息和输出功能。
图16 舵机测试系统软件架构
5.1.1 硬件管理
硬件管理用于管理和驱动与测控系统相关的硬件资源、数据采集卡、通讯板卡等模块。硬件管理是系统的基础、各项测试任务实现均需要板卡的驱动和支撑。数据采集模块主要用于管理数据采集卡,用于实现AD、DA打开、输出、采集和关闭等功能。协议通讯用于完成数据打包、发送/接收等功能。
5.1.2 软件设置
软件设置用于管理和设置软件相关参数、例如控制参数、板卡配置、记录参数、测试人员等信息。软件设置参数模块:用于软件相关参数的设置。包括显示、刷新、维护等功能;
配置管理模块:用于管理和存储软件配置,包括打开、保持、配置等操作;
软件自检:对系统的功能进行自检和测试,保证系统安全可靠的工作。
5.1.3 测试流程
编制合适的测试流程是自动测试系统能够正常执行的关键[15]。舵机测试系统测试流程用于管理和调度相关的内容,是测试系统的功能核心,各项测试任务均由该部分来实现。任务下达模块完成舵机性能测试项目和内容的分配;
单项测试控制模块完成舵机单项测试;
时序控制模块完成舵机全时序自动测试功能。
5.1.4 数据记录
舵机测控系统数据记录模块完成测试数据的管理和存储等功能,完成测试数据的整理与转换。数据存储模块在测试结束后、按照记录要求完成测试数据的保存、以便进行后处理和分析。
5.1.5 人机交互
用于界面显示、参数显示、曲线刷新、测试消息显示及测试过程更新等功能、是软件与测试人员的交互区域、通过软件控件调用实现人机界面友好。
5.2 舵机性能测试
5.2.1 滞环性能测试
当测试平台测控系统发出一定斜率的线性控制信号时,气动舵机在负载台上拉动加载装置按照控制信号进行相应的动作,同时形成反馈信号返回测控系统。由于舵机零件加工、舵机设计等各种误差的存在,测控系统给于气动舵机的线性控制信号与气动舵机反馈信号曲线一般不会重叠,而是在测控系统输入-气动舵机反馈信号输出曲线上呈现出一闭合回路的一种非线性系统特性,为气动舵机的滞环特性。该特性决定了气动舵机的稳态误差,控制精度等,因此测试平台实现了对该特性的测试。测试平台测控系统经过14位12通道同步模拟输出PCI-1727U的AO板卡得到一个通道输出,如下:
Vi(t)=tt=(0,10)s
该线性控制信号经过DA调理机箱,对舵机进行控制,舵机得到控制指令后,进行驱动动作,舵机根据反馈得到曲线PCI-1715U-AE的12位32通道隔离保护模拟量输入AI板卡采样时间间隔设定为1 000 ms,采集过程采用LABVIEW数学函数模块的线性拟合得到:
VO(t)=At-Bt=(0,10)s
当t=Β/Α时即为舵机迟滞时间,将t=Β/Α代入到Vi(t)=t得到的Vi(t)电压值即为舵机的滞环电压值。
5.2.2 线性度性能测试
舵机反馈输出VO(t)中,采用LABVIEW函数包中的最小值与最大值模块提取最大值与最小值,并做差计算,差值与(10A-B)的比值即为舵机的线性度值。
5.2.3 灵敏度性能测试
测控系统采集的VO(t)=At-B输出,其斜率A值即为舵机的灵敏度值。
5.2.4 频率特性测试
气动舵机测试平台对气动舵机的测试最为关键的性能为频率特性测试,包含幅频特性和相频特性两大项。频率特性[16]在线测量时,一般采用伪随机二进制序列或白噪声测试信号的广谱测量法[17]。当测量时间收到限制时,以多频信号测量为佳,目前该测量方法在电子产品的检验中应用较多[18-21],但在一般舵机常规测试中,仍都选用正弦波扫频测量,这里采用单个正弦波扫频测量法。
频率特性测试时由气动舵机测试平台的测控系统软件编程后控制PCI板卡经DA调理板输出Vi(t),气动舵机根据Vi(t)信号做出响应后,以拉杆行程的形式输出V0(t)信号,V0(t)信号再经AD调理板输入到测控系统,由计算机软件实现Vi(t)与V0(t)的频率特性关系算法。
由此舵机频率特性测量取决于测试信号Vi(t),V0(t)。当测试设备信号为Vi(t)=Asinωt时,气动舵机的稳态输出为[11]:
V0(t)=asinωt+bcosωt+N(t)=Bsin(ωt+φ)+N(t)
(3)

根据三角函数的正交性有:
(4)
(5)

通过上式(4)和(5),可求出方程(3)中的幅值B、相移φ。上式不断积分时,N(t)误差可趋于0。

按上式求出的a及b可减少e1、e2对计算精度的影响,理论上讲,M越大,对减少e1和e2的影响效果越好,但需要较长的测试时间。一般来说M可根据被测对象噪声环境而定,噪声严重时M取大些。另外,为减少噪声的影响,在信号处理前进行了滤波,因而在以后的误差分析中,不专门考虑随机误差e1和e2的影响。
求解舵机频率特性的幅频特性和相频特性实质就是求B/A和φ在不同频率ω下的值。而求B/A和φ主要是计算a和b。求积分式的方法很多,考虑实时计算及采样点的可用性,这里应用梯形公式求解[22]。


(6)
rb+r2
(7)

6.1 幅频特性的误差分析
幅频特性误差分析的目的在于求出用a和b等计算B/A和φ时可能出现的最大误差。在按(6)和(7)求解a和b时,截断误差的计算公式为[22]:
数据精度引起的计算误差主要包括两部分,一是数字运算过程中的有限字长引起的误差,该部分可在编程中通过选择适当变量类型而减少至相对其他计算误差可忽略的程度;
二是A/D转换的量化误差,该部分当A/D转换位数较低时是数据精度误差的主要来源。设被测舵机输出的信号为VO(t),经A/D转换后的数据为VO(ih),其量化误差为:
ei=(i=1,2,……,M)
则有:
VO(t)=VO(i·h)+eii·h≤t≤(i+1)h
(8)
将式(8)代入(6)有数据精度引起的误差为:
式中,em是板卡A/D转换输入信号的最大转换误差,与A/D转换器的位数有关,对于12位A/D转换器:
em=2-11Vm=ρ2-11B

其真值a和b与计算结果c和d的关系如下:
b-kB(r+e)≤c≤b+kB(r+e)
(9)
a-kB(r+e)≤d≤a+kB(r+e)
(10)
式中,K≥1,是误差修正系数,主要是考虑误差e1、e2而引入,当不考虑e1、e2时,K=1。
同样,对于输入信号Vi(t)=Asinωt进行处理,并令
则有下列不等式:
A-k1A(r+e)≤f≤A+k1A(r+e)
(11)
式中,K1意义同式(9)中的K相同。


(12)
式中,
其中:g=k(r+e)>0,g1=k1(r+e)>0。

表4 不同采样点数N与L和G的关系
由表4可以看出,随着采样点数N的增加,计算结果精度提高,但N大则要求A/D采样速度快。在实际计算中,只要N≥100,计算误差就小于60 dB,即精度在0.7%左右,可满足工程上的需要。
6.2 相频特性的误差分析
关于相率特性的计算误差可以通过c/d来确定,根据式(9)、(10)并根据不等式原理有:
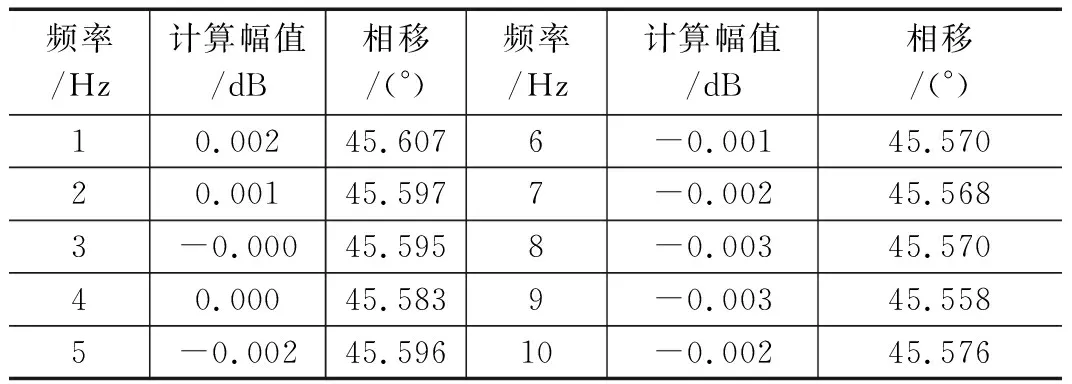
因为φ=arctg(x)在(-∞ cosφ-sinφ=-2g 当K=1,N=100时,φ≈45°为出现最大计算误差角度,这时最大计算误差为0.2°。当N=50,N=200时,最大误差分别为0.44°和0.14°。可见一个周期内的采样点数N对计算误差影响最大。 利用气动舵机通用测试平台输入Vi(t)=Asinωt信号,经过板卡数据采集采样点数N=100,舵机输出VO(t)=Bsin(ωt+φ),其中幅值A=B=4 V,ω为1 Hz~10 Hz,信号相角差为0°,则其幅频比值为1,即20lg(A/B)=0,频率特性测试结果与误差如表5所示。 表5 频率特性测试结果与误差(相角差为0°) 经过板卡数据采集采样点数N=100,舵机输出VO(t)=Bsin(ωt+φ),其中幅值A=B=4 V,ω为1~10 Hz,信号相角差为45°,则其幅频比值为1,即20lg(A/B)=0,频率特性测试结果与误差如表6所示。 表6 频率特性测试结果与误差(相角差为45°) 经过板卡数据采集采样点数N=100,舵机输出VO(t)=Bsin(ωt+φ),其中幅值A=B=4 V,ω为1~10 Hz,信号相角差为90°,则其幅频比值为1,即20lg(A/B)=0,频率特性测试结果与误差如表7所示。 表7 频率特性测试结果与误差(相角差为90°) 从以上试验结果可见,试验系统幅频特性的数据处理误差最大是0.007 dB,与信号频率无关,相角处理误差近似一常数,最大为0.607°,也与频率无关,与上述误差分析的结论保持一致。从实测相角误差的分布规律来看,对于相同的板卡采样N时,误差都集中在一固定值附近,而且这个固定值始终大于零,证明采用的计算方法形成的误差是服从一定规律的误差。为提高气动舵机测试平台的精度,可在测试结果中减去与采样点N相应的固定值。如当N=100时,在测试相角结果中减去0.6°,那么测试平台的相角测试误差将小于0.042°; 航空飞行器气动舵机通用测试平台能完成舵机灵敏度、线性度、滞环特性、频率特性等性能指标的测试,特别是采用了正弦波扫频测量算法,实现了多种型号舵机频率特性的测试。为提高测试平台测试精度,对测量舵机的频率特性做误差分析,根据分析结论提出了测试结果中减去与采样点N相应的固定值方法,经实际验证应用,有效提高了测试平台的测试精度。6.3 频率特性试验结果分析


当N=50时,在测试相角结果中减去1.2°,那么测试平台的相角测试误差将小于0.028°。




