【www.zhangdahai.com--其他范文】
方志辉,林 珊,赵仕波
(1.国网岱山县供电公司,浙江 舟山 316200;
2.舟山建设技术学校,浙江 舟山 316200;
3.岱山县仕波电子经营部,浙江 舟山 316200)
石化能源日趋枯竭,价格不断攀升、造成环境污染严重,世界各国把目光转向绿色可再生能源,中国将提高国家自主贡献力度,CO2排放力争于2030 年前达到峰值,争取在2060年前实现碳中和[1-2]。与风电、光伏等可再生新能源相比,潮流能运行规律性强、能量密度高、储量庞大,有很好的开发利用价值。
美国、英国、意大利等国相继研究出潮流能发电装置[1,3]并进行实海况测试,已有部分潮流能电站投入商业化运行。我国自2010年设立海洋可再生能源专项资金,潮流能发电技术不断发展与突破,哈尔滨电气集团有限公司、中国海洋大学、哈尔滨工业大学等一批国内企业和高校致力研究潮流能发电装置[3-4]。王项南[3]对潮流能发电装置测试与评价标准进行了研究。袁鹏[5]用数值模拟和模型水槽试验潮流能水平轴水轮机的水动力学性能。陈立卫[6]对潮流能永磁发电机进行有限元分析研究。很多学者对浙江舟山附近的潮流能进行分析和评估,吴亚楠[7]用FVCOM 数值模式对舟山普陀山-葫芦岛水道附近海域潮流场进行模拟计算,比较真实地反映该海域海水的运动规律,表明潮流能蕴藏量和可开发量相当可观。2016 年7 月,世界首台“3.4 MW LHD模块化大型海洋潮流能发电机组”在舟山秀山岛顺利下海发电,并实现全天候连续发电并网运行。
关于潮流能发电系统最大功率点跟踪控制的研究较少被报道。目前有些相关方案的可行性、调控规律及操作效果等并没有获得理论及试验的验证,他们的研究重点在于低速数字式变量泵,但光伏、风力发电系统最大功率跟踪控制技术已很成熟[8-10]。借鉴比较成熟的风力、太阳能发电设计,分析潮流能发电系统最大功率跟踪控制系统,设计最佳控制策略,建立仿真模型,通过设置相关参数,验证其有效性。
1.1 潮流能基础知识[11-13]
海水流向一天改变2次,达到峰、谷值各1次,因此海水运动规律的周期T 取24 h,可用三角函数近似描述海水流速一天内变化情况:

式(1)中,Vm为平均流速。为研究方便,设初相角为零。由流体力学知识得,潮流能与风能密度都正比于,
故水轮机从潮流能中转化功率为:

式(2)中,β为水轮机功率转化系数;
ρ为海水密度;
S为水轮机迎流面积;
Ω为机械角速度。不同潮流流速下,水轮机机械角速度-输出功率特性曲线,见图1所示。

图1 不同流速下Pm-Ω曲线Fig.1 Pm-Ω curves at different flow rates
经理论推导结合图1,可得

同时可以得到处于最优叶尖速比λopt(λ=ΩR/v为叶尖速比,即叶片尖端r=R处的切速度ΩR与流体速度v的比值)时,叶轮受到的最优机械转矩为:

在变速运行中,只要保持λ=λopt,就能达到最大功率。变速运行的MPPT控制手段是根据流体的实时流速,调节水轮机叶轮的转速Ω始终保持在最优叶尖速比λopt[14-17]。为了实现转速Ω的调节,只需要改变Boost 电路的占空比D,然后PMSG 输出电压有效值Um会产生变化,转速Ω随之变化,闭环控制流程为:D→Ud→Um→Ω→λ→Pm→D。
1.2 潮流能发电系统
图2 为采用直驱永磁同步发电机(PMSG)的潮流能发电系统结构示意图,由水轮机、PMSG和变流器及控制器组成[3,5-6],具有结构简单、成本低、控制难度小、启动性能好和较宽调速范围的优点。此外PMSG还具有体积小、发电效率高、可靠性高、运行噪声低和对负载变化反应快等特点。
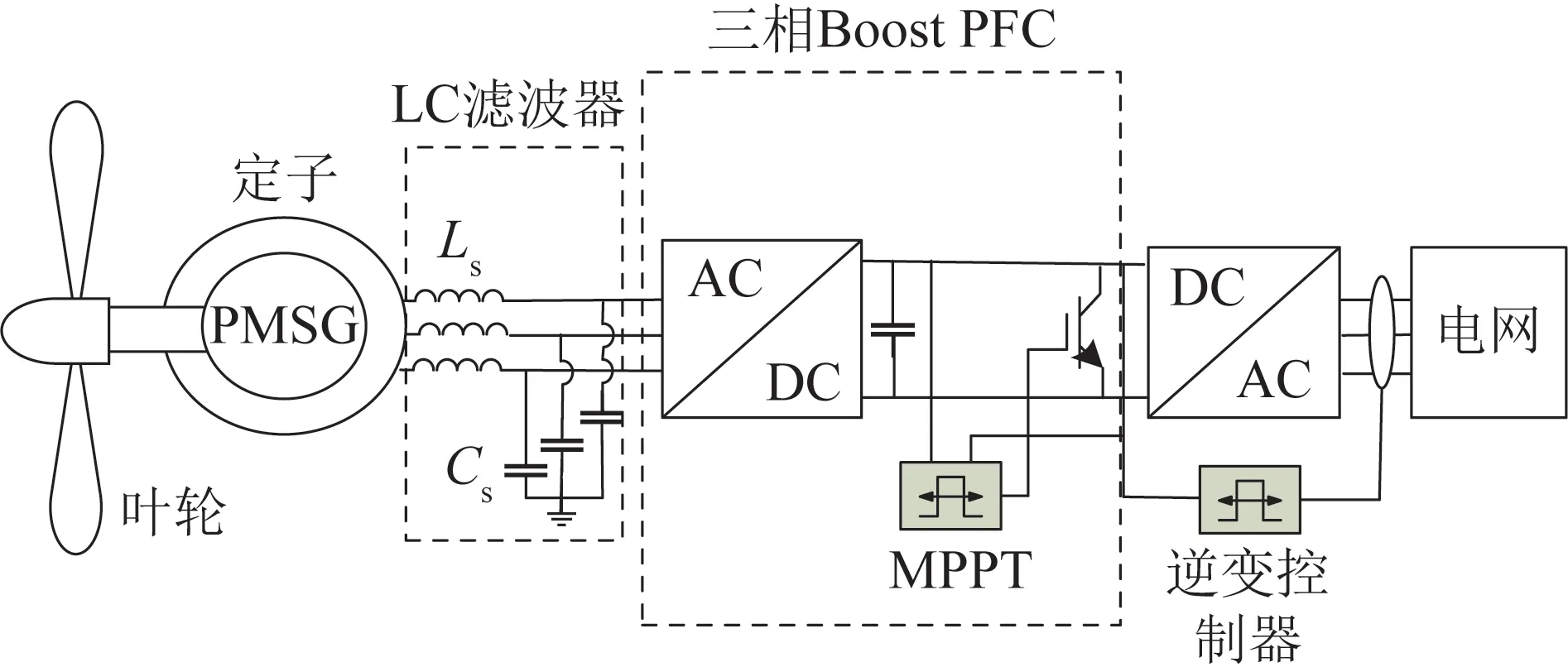
图2 含PMSG的潮流能发电系统结构图Fig.2 Structure diagram of tidal current power generation system with PMSG
发电机输出的是不稳定三相交流电,电压、频率跟随工况发生变化,首先进行三相桥式整流,再用三相Boost 型功率因数校正(PFC)电路变流,最后逆变为具有理想幅值和频率的交流电,并入电网。其中Boost 模块的控制方法比普通Boost 升压模块不同点在于电感前置到交流侧,形成三相电感,不仅可以实现整流和稳压,还能改善交流侧的功率因数的效果[18-24],见图3。

图3 三相Boost型PFC结构图Fig.3 Three-phase Boost PFC structure diagram
水轮机有变速和变桨两种运行方式。变速运行指水轮机的输出功率未达到其额定值,采用MPPT 控制使输出始终保持在当前流速下的最大输出;
变桨运行指输出已经到达额定值,而流速还在增大,希望增大桨距角使其稳定在额定输出功率,如果超过切机流速,就快速停机[14-17]。
MPPT 控制方法常应用于各种波动性强、随机性大的新能源中,通过对某一运行参数的调控使发电系统能够输出最大功率,是运行参数的自我优化过程。从原理上讲MPPT 是一个阻抗匹配的过程,除负荷以外部分的内电阻为R,从发电机看入可变负荷的电阻为RL,当RL=R时,负荷能得到最大功率。运行条件是在不断变化的,即R在改变,MPPT 是通过控制手段改变从发电机看入的负荷电阻RL,使其与R进行匹配。
2.1 变步长PO算法设计
MPPT 有多种方法,常用的如最佳叶尖速比法(TSR)、功率信号反馈法(PSF)、最优转矩法(OTC)、扰动观察法(PO)和最优梯度法(OGC)等,通过对5 种常用的MPPT进行对比,总结见表1。
通过对比分析可知,TSR、PSF 和OTC 存在控制难度大或精确度低的问题,PO方法比较适合永磁同步发电机的变速发电系统,但PO法的局限性可以通过步长|∆Ω|和迭代周期∆T的设置体现出来:
1)步长|∆Ω|过大将引起极值点附近的振荡,造成功率损耗,降低系统效率;
2)步长|∆Ω|过小将引起收敛速度变慢,影响系统响应特性;
3)迭代周期∆T过大也影响系统的响应特性,同时使结果不精确;
4)迭代周期∆T过小将严重消耗内存和计算速度,提高硬件成本。
OGC 的缺点是需提前知道Cp-λ曲线计算梯度数值,设计将梯度进行替代,改为不需要提前知道水轮机的特性就能计算出而且能够反映Pm-Ω变化趋势的参数。
1)分析利用占空比D 对PMSG 输出功率进行控制。
PMSG 输出的相电压有效值为Um。Boost 升压模块输出稳定的直流电压Uout给DC/AC 模块。PMSG 输出功率Pg=Pm-∆Pm,机械功率损耗∆Pm是定值。
三相Boost 型PFC 中的Boost 升压模块采用临界DCM运行方式:

式(5)表明:D和Ω的关系是线性的,可通过对占空比D的控制替代对转速Ω的控制,两者的控制方向是相反的。采用PO方法判定向正向扰动|∆Ω|,相应应该向负向扰动|∆D|;
判定向负向扰动|∆Ω|,相应应该向正向扰动|∆D|。
2)寻找替代梯度的变步长。
要求步长能反映曲线变化趋势而计算不需要提前知道很多参数。考虑采用相邻扰动点的连线斜率来替代步长,具体迭代公式为:

式(6)中,∆Pgk=Pgk-Pg(k-1),∆Dk=Dk-Dk-1,∆Pmk=Pmk-Pm(k-1),∆Ωk=Ωk-Ωk-1;
h1,2为调节收敛系数。
为防止振荡,当∆Pmk=0时,取前一步的半步长:

3)迭代算法设计。根据式(6)和式(7)设计步骤如下:
①输入初始的占空比D0=0.5,占空比上下限[Dmin,Dmax]=[0,1],水轮机的额定机械功率PmN和额定转速ΩN,常数h2=0.05,准备迭代;
②设第k步的转速和测得输出功率分别为Ωk和Pmk,计算∆Ωk、∆Pmk;
③|∆Pmk/PmN|>ε时,采用式(6)计算下一步占空比,|∆Pmk/PmN|ε时采用式(7)计算占空比,特别有|∆Dk|<ε时,保持Dk+1=Dk不变,提高计算速度。
④重复②、③步。
采用基于扰动观察法和最优梯度法相结合的改进变步长的PO 方法,收敛速度大大加快,并且通过步长的调整避免了振荡的发生,同时这种方法不需要充分了解水轮机和PMSG的特性。
为验证潮流能的可利用性及MPPT 方法的适用性,本文以位于舟山本岛和秀山岛之间具有复杂地形的灌门水道——岱山秀山潮流能为研究对象。王智峰曾对水道的8个位点的流速统计信息进行了连续26 h的观测与分析统计,并估算可开发的潮流能功率[25-26]。因此,为简化问题,鉴于水平轴潮流能水轮机组的单台常见容量为50 kW,选用其中合适的位点搭建50×2 kW的潮流能发电站模型。
单个半径为2 m 的叶轮额定机械功率为5 kW,所以50 kW 的发电机组,需要包含10 个叶轮,叶轮的实际模型非常复杂,采用Simulink 中自带的编程模块[27-35],模块结构见图4。海水ρ取1 025 kg/m3,桨距角β取2.25,海水流速v取2 m/s,叶轮半径R取1 m,机械角速度Ω从0 升至30 rad/s,当Ω取到15 rad/s,叶尖速比λ为7.5,Cp和Pm同时达到最大,分别为0.4 和5 kW,但Tm的极值点,约在Ω取到10 rad/s 左右达到最大。
按1.2 介绍的PMSG 直驱+三相Boost 型PFC 模型建立含潮流能发电系统仿真图,见图4所示。

图4 潮流能发电系统仿真模型Fig.4 Simulation model of tidal current power generation system
计算Boost 模块中的主要参数,主要包括LC 滤波器参数Ls和Cs、激励三相电感L和输出滤波电容Cd,取抑制纹波率u%=0.1,计算如下:
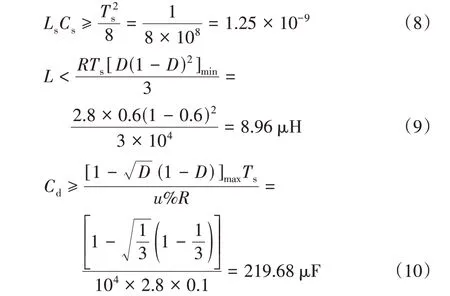
在仿真中将MPPT分别设置为传统扰动观察法与改进变步长的扰动观察法,并根据实际读数进行不断调整,最后选定Ls=1 mH,Cs=200 μF,L=5 μH,Cd=300 μF,其余参数设置在此略去,仿真结果如图5-图7所示。
图5 可以看到两种算法的Cp基本保持在最大值0.4 左右,而随着流速的变化,机械功率呈三阶梯状,Pm1∶Pm2∶Pm3=37∶59∶47。采用传统扰动观察法的输出电压Uout波形和相应的谐波畸变率THD%见图6,变步长的扰动观察法见图7,对比图6 和图7 看到,后者输出电压的谐波畸变率更小,电压更平稳,验证所提的改进MPPT策略更有效。

图5 流速变化时水轮机的利用系数和机械功率(左为PO,右为变步长PO)Fig.5 Utilization coefficient and mechanical power of hydraulic turbine with flow-rate variation (left is PO;right is variable step-length PO)
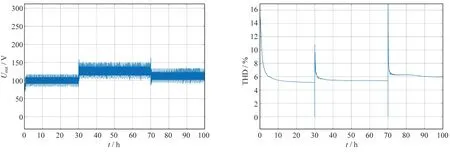
图6 流速变化时系统的输出电压和谐波畸变率(传统扰动观察法)Fig.6 Output voltage and THD of the system with flow rate changing(traditional disturbance observation)

图7 流速变化时系统的输出电压和谐波畸变率(变步长的扰动观察法)Fig.7 Output voltage and THD of the system with the flow rate changing(variable step disturbance observation)
潮流能直接接入海岛电网,能减少电能跨海传输造成的线损,实现就地功率补偿,可提升供电可靠性。本文对潮流能发电系统的最大功率点跟踪控制进行算法设计,用Simulink仿真验证控制策略有效,同时表明三相Boost 型PFC 模块在控制直流输出端谐波以及改善交流输入端功率因数上表现良好,对类似具有波动性的新能源开发具有一定的参考价值。
猜你喜欢 观察法水轮机三相 水轮机过流面非金属材料的修复及防护大电机技术(2022年3期)2022-08-06浅谈低压三相异步电机启动保护的选择与应用防爆电机(2022年3期)2022-06-17基于MATLAB和PSD-BPA的水轮机及调速系统参数辨识研究大电机技术(2022年2期)2022-06-05混流式水轮机主轴自激弓状回旋机理探讨大电机技术(2022年2期)2022-06-05基于扰动观察法的光通信接收端优化策略汽车实用技术(2022年5期)2022-04-02水电站水轮机制造新工艺的探析建材发展导向(2021年13期)2021-07-28如何求数列的通项公式语数外学习·高中版下旬(2021年10期)2021-02-18笼型三相异步电动机的起动和调速解析防爆电机(2020年5期)2020-12-14基于Motor-CAD三相异步感应电机仿真计算分析防爆电机(2020年3期)2020-11-06小学语文写作教学中观察法的运用作文成功之路·小学版(2020年1期)2020-03-03本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0610/609536.html



