【www.zhangdahai.com--其他范文】
李克宁 宋柱梅
(深圳信息职业技术学院信息与通信学院,广东深圳 518172)
随着经济的发展和科技的进步,移动互联网技术在汽车中得到了广泛的应用。为了提高复杂工况下车辆的安全性、舒适性和智能水平,当前的汽车设计中越来越多地加入了新的高科技设备元素,通信、交通、汽车、计算机和人工智能等多产业交叉融合发展,智能化、信息化、电动化也成为汽车行业普遍认可的发展方向[1-2]。智能网联汽车(Intelligent Connected Vehicle,ICV),是指车联网与智能车的有机联合,集智能环境感知、自动路径规划和智能决策决策控制、不同类型和等级智能辅助驾驶等功能于一体的综合高科技智慧出行交通工具,是典型的多学科多领域交叉的高新技术综合体[3-4]。虽然,车载智能感知和融合技术给车辆智能化水平提供和很好支撑,但是,随着车辆智能技术深入发展,尤其是自动驾驶技术的快速发展,车载智能终端在复杂多变的交通场景中暴露出来的安全隐患难以很好解决[5-6]。
本文针对车载智能终端在复杂多变的交通场景中暴露出来的安全隐患难以很好解决的问题,基于大带宽、低时延的移动通信技术和车联网技术,提出一种基于云-边-端-控的ICVs纵向优化控制方法。
ICV是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(车、路、人、云等) 智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现替代人来操作的新一代汽车。本文研究思路是结合ICV概念,基于大带宽、低时延的移动通信技术和车联网技术,对基于云-边-端-控的ICVs纵向优化控制方法进行研究,系统整体结构如图1所示。主要包括5个部分:第一,基于车-路-云系统,利用云存储技术收集智能网联汽车运行状态,利用云计算平台对交通耦合数据进行智能计算和决策;
第二,发挥智慧灯杆的路侧边缘计算单元智能感知和交互优势,通过智能路侧基站将决策指令传递到距离车辆最近的边缘计算单元;
第三,开展数据融合计算,将车辆控制单元将车载智能单元感知的信息和来自边缘计算节点的信息深度融合,形成车辆控制指令;
第四,设计ICVs纵向最优控制器,通过线控执行模块实现对车辆的纵向优化安全控制;
第五,对提出的系统进行仿真分析,验证其有效性。
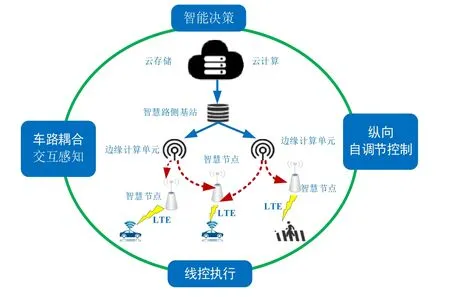
图1 云-边-端-控的ICVS纵向控制系统结构图
1.1 车-路-云协同
车-路-云协同系统基于道路交通综合管控平台开发实现车路协同设施安全接入验证服务,为自动驾驶车辆提供可靠的出行预测、规划决策的远程实时监测协同系统。云存储技术收集智能网联汽车运行状态,包括运行车辆和特殊车辆,例如突然插入的车辆信息。获取ICV信息后,云计算平台对交通耦合数据进行智能计算,经过人工智能算法将识别车辆转换为决策信息数据,通过V2X通信和骨干车联网传输给车-路系统提前发送给即将驶入有安全威胁区域的车辆。
1.2 边缘计算和通信
边缘计算是面向自动驾驶环境感知和数据处理的重要技术。ICVs可以通过从边缘节点(RSU)获得更大范围的环境信息,更重要的是可以向边缘节点转移或卸载部分计算任务以解决计算资源不足的问题。路侧边缘计算主要布局在智慧灯杆上,和城市路灯融为一体。智慧灯杆路侧边缘计算单元通过自身安装的激光雷达、毫米波雷达和视觉系统智能感知车路及交通信息,具备车路之间实时快速的数据和信息交互优势,通过智能路侧基站将决策指令传递到距离车辆最近的边缘计算单元,丰富ICVs的环境感知范围和智能处理能力。
1.3 数据融合
车路协同传感器采集的大量的数据如视频数据、激光扫描数据、微波感知数据等,边缘计算节点将这些数据进行解析、整合,形成如交通流量、车速等结构化数据,然后下发给ICVs的车载智能计算单元(OBU)。车载智能计算单元利用车载的激光雷达和视觉系统类似感知到车辆周围的交通流量、车速等结构化数据,但是两个系统之间感知的数据和时空都是有差异的,采用数据融合技术实现交通流量、车速等自动驾驶决策使用的关键信息在数据冗余互认和时空一致性统一,进而形成车辆控制指令,发送给车辆执行系统。
1.4 ICVs控制执行
ICVs安全行驶信息经过深度融合后形成车辆控制指令,通过线控执行模块实现对车辆的纵向优化安全控制,控制执行系统结构与软件流程如图2所示。
如图2所示,ICVs控制执行系统的控制逻辑如下:

图2 ICVs控制执行系统结构与软件流程图
步骤1:建立控制指标评价参数,包括目标车-车距离、目标车速、目标车速差等;
步骤2:利用车载网获取车载智能传感器信息,融合车联网传递的路侧智能感知信息,车辆状态监控单元进行交通拥堵和干扰车状态判断;
步骤3:多模态有限状态切换控制器根据交通拥堵和干扰车状态,选择车-车安全距离等不同模态的有限状态控制;
步骤4:线控执行控制单元是自动驾驶车辆重要的执行系统,根据驱动和制动需求执行分别选择线控驱动或线控制动系统对车辆进行控制;
步骤5:实时运行状态信息感知和反馈,智能感知和协同处理模块,实时监控实验网联车ICVs运行和相应交通环境信息,并上传云端,对控制过程进行实时检测和调整。
本节基于MATLAB/Simulink平台,针对所提出的控制防范建立云-边-端-控的ICVs纵向优化控制的仿真分析系统,通过不同的仿真试验对所提出的控制系统的性能进行验证。
2.1 干燥路面结果分析
综合对比分析干燥路面的测量工况下,系统不同位置车辆车速、跟踪误差等变量的自适应情况,测试评估所提模型对不同车辆的控制结果。测试设置为5辆ICVs组成多车模型,行驶速度80km/h。根据仿真分析结果可知,车-车之间距离都大于0,证明没有车辆碰撞情况发生,行驶安全。其中,车-车之间距离最小7.0m,危险,但没有发生事故。根据测试结果分析,建模效果、系统在功能及性能方面表现良好,可以在指定环境中稳定运行,满足系统设计要求。
2.2 湿滑路面结果分析
类似于干燥路面,综合对比分析石化路面的测量工况下,系统不同位置车辆车速、跟踪误差等变量的自适应情况,测试评估所提模型对不同车辆的控制结果。测试设置同样为5辆ICVs组成多车模型,速度80km/h。根据分析结果可知,车-车之间距离都大于0,证明没有车辆碰撞情况发生,行驶安全。其中,车-车之间距离最小2.1m,虽然没有发生事故,但是情况比较危险。
根据测试结果分析,整体上看,建模效果、系统在功能及性能方面表现良好,可以在指定环境中稳定运行,满足系统设计要求, ICVS纵向优化控制系统能够充分利用云-边-端-控的信息,够快速、精确的跟踪不断变化的行驶工况,执行不同的控制指令,保证车辆快速稳定进入安全行驶状态。
本文针对高级别智能网联车车载智能终端在复杂多变的交通场景中暴露出来的计算力不足造成的安全问题,大带宽、低时延的移动通信技术和车联网技术,提出一种基于云-边-端-控的ICVs纵向优化控制方法。重点关注云-边-端-控平台优势下的多智能网联汽车的纵向优化控制的关键问题。基于车-路-云系统,利用云存储技术收集智能网联汽车运行状态,利用云计算平台对交通耦合数据进行智能计算和决策;
采用路侧边缘计算单元获取智能感知信息,通过智能路侧基站将决策指令传递到距离车辆最近的边缘计算单元;
采用车辆控制单元将车载智能单元感知的信息和来自边缘计算节点的信息深度融合,形成车辆控制指令;
设计ICVs纵向最优控制器,通过线控执行模块实现对车辆的纵向优化安全控制。最后,通过仿真试验对整个系统进行验证,结果证明所提出的控制系统是有效的。




