【www.zhangdahai.com--其他范文】
冯维婷 梁 青
(西安邮电大学电子工程学院,陕西西安 710121)
雷达目标中的风轮机[1]、直升机[2],无人机[3]是一类有旋转叶片的目标,此类目标的雷达回波信号中会包含旋转叶片的长度、转速,初始旋转角信息,准确地提取出这些参数是识别目标类型的重要依据[4-6]。因此,对目标旋转叶片参数的提取分析是雷达信号处理领域的研究热点[7-8]。
旋转叶片的运动属于微动[9],目标微动会在雷达回波信号中产生额外地频率调制称为微多普勒频率[10-11]。对叶片微动参数的估计问题,大量的文献基于时频谱图处理。主要有两种处理方法:一种处理是在时频谱图中搜索局部峰值点得到时频脊线[12],其中蕴含了目标的微多普勒频率,从最大微多普勒频率中反演出旋转叶片的微动参数[13-14];
一种处理是对时频谱图进行逆Radon 变换[15-16]、Hough变换[17]等将微动参数估计问题转化为变换后的参数空间的峰值检测问题。文献[13-14]的实测数据表明,强杂波环境中的时频谱图模糊,微多普勒频率有较大波动,采用第一种时频谱图处理方法的微动参数估值存在较大波动,影响了参数估计精度;
而第二种处理方法在雷达回波信号存在强闪烁[18-19]、正弦曲线特征不明显时方法失效,无法估计微动参数。
针对强闪烁现象下旋转叶片的参数估计问题,文献[20]利用DnCNN网络结构训练去闪烁网络,消除了时频谱图中的“闪烁”条,得到了正弦特征增强的旋转叶片时频谱图,然后基于逆Radon 变换估计出微动参数。然而实际情况中,目标所处的噪声、干扰环境复杂,该方法性能严重下降甚至失效。文献[21]利用相位补偿方法将相同叶片的“闪烁”条聚焦到特定多普勒频率,实现了微动参数的估计,但情况分类较多,方法过于复杂。
针对强闪烁情况下旋转叶片微动参数估计的问题,本文从调频连续波(frequency modulated con⁃tinuous wave,FMCW)雷达回波信号的特点出发,提出了微动补偿方法完成旋转叶片参数估计。建立了FMCW 雷达的旋转叶片基带回波模型,在闪烁现象下回波信号具有周期性脉冲特征的基础上,构造了基于周期脉冲模型的微动参数补偿算子对回波信号进行参数补偿,搜索补偿后信号能量峰值完成了旋转叶片微动参数的估计。利用FMCW 毫米波小型雷达系统IWR6843 搭建实验平台进行实测数据采集,仿真和实测数据的实验结果表明,所提方法在强闪烁、干扰和噪声存在的实际情况下可得到较高精度的参数估计值。
FMCW 雷达系统通过获得旋转叶片回波可进行叶片相关参数估计。叶片上某散射点P与雷达的空间几何关系如图1所示。

图1 雷达与叶片几何关系示意图Fig.1 Diagram of geometrical relationship between radar and blades
雷达波束中心O与旋转叶片中心O′之间距离为R0,散射点P到O′的距离为rP,散射点P所在叶片与OO′的夹角为φ(t),则散射点P到雷达的瞬时距离为RP(t)=图1 中雷达坐标系XYZ与目标坐标系xyz的各坐标轴均平行,叶片在xz平面旋转,散射点P与x轴的初始夹角为θ0,t时刻的夹角θ(t)=2πfrt+θ0,其中fr为旋转频率;
图中α是方位角,β是俯仰角。

其中,cosφ(t)=cosαcosβcosθ(t)+sinβsinθ(t)。雷达发射LFM 信号,中心频率fc对应的载波波长为λ,散射点P的基频回波信号表示为[22]

假设目标已经定位,且完成平动补偿,去掉式(2)中RP(t)的第一项R0部分,剩下目标微动部分,目标微动回波信号表示为

式(3)中回波信号相位的导数就是微多普勒频率,表示为

由式(4)可见,叶片上散射点P的微多普勒频率fP(t)是正弦曲线形式,正弦曲线的频率是叶片旋转频率fr、幅度和初相大小与目标的位置α、β角有关,还与叶片的参数rP、fr有关。叶片长度为r,在r上对式(3)进行线积分,则单叶片的回波信号表示为

根据信号处理理论,sinc(⋅)与rect(⋅)是一对傅里叶变换对,即sinc(t) ↔FTrect(f),所以,式(6)中sinc项的微多普勒频率为周期性矩形脉冲信号。式(6)中指数项的微多普勒频率是正弦信号;
时域上指数项与sinc 项的乘积,在频域是两者微多普勒频率卷积的结果,故时频谱图中出现周期性矩形脉冲信号,被称为闪烁条[23]。
采用短时傅里叶变换(short time Fourier trans⁃form,STFT)[24]的时频分析方法得到2 叶片和3 叶片的回波信号时频谱,如图2(a)、(b)所示。图2(a)中偶数叶片的微多普勒频率表现为正负频率关于时间对称的闪烁条。图2(b)中奇数叶片的微多普勒频率表现为正负频率等间隔交错的闪烁条。

图2 基于STFT的时频谱Fig.2 Time-frequency spectrum based on STFT
图2(a)中,叶片数为2,每转动π rad 一对叶片就都与雷达视线垂直,因此在一个转动周期中包含2 个正负频率对称的闪烁条。图2(b)中,叶片数为3,每转动π/3 rad,就会有一个迎着或背着雷达的叶片交替着与雷达视线垂直,所以一个周期中包含6个正负频率交错的闪烁条。
另外,根据式(4),当俯仰角β=0时,即雷达视线在XOY平面时,叶尖处最大微多普勒频率为fmax=cosα;
当方位角α=0 时,fmax=由以上分析可知,最大微多普勒频率值由参数r、fr、α,β和λ共同决定,蕴含了叶片的尺寸和运动信息。文献[13-14]中的基于时频谱图的参数提取方法原理就是根据α,β和λ确定已知时,最大微多普勒频率值fmax由微动参数r和fr决定,故基于时频谱图测得最大微多普勒频率值fmax后再反演出旋转叶片的微动参数r和fr。文献[13-14]中具体的基于时频谱图的参数提取方法是先对时频谱图的微多普勒曲线做傅里叶变换,得到旋转频率fr的估计,再在时频谱图中估计最大微多普勒频率fmax,得到fr和fmax这两个参数之后,根据r=可以推算出旋转长度r。
旋转叶片的参数主要是:旋转长度r、旋转频率fr和初始旋转角θ0。对于旋转频率fr的估计,常用的算法有自相关、奇异值分解方法,以及对微多普勒曲线进行频谱分析方法,实际的雷达回波信号存在目标能量微弱或正负频谱能量不对称的情况,这些方法不适用于实际复杂情况。对于旋转长度r的估计,目前常采用的方法是基于时频谱图直接估计最大微多普勒频率fmax,然后推算出旋转长度。然而,时频谱图直接估计最大微多普勒频率的误差较大,这是由于旋转叶片形状、雷达的位置,以及各种干扰和噪声都会影响雷达回波时频谱图的清晰度,导致这种方法估计得到的r误差较大。考虑到实际情况,为了有效进行微动参数的估计,结合雷达回波信号模型特征的基础上,本节采用微动参数补偿的方法实现旋转叶片微动参数的估计。
从图2 的旋转叶片时频谱图可看出,回波信号的能量分布在闪烁条和正弦曲线上。如果构造补偿信号进行微动补偿,当补偿完全时,补偿后信号能量集中于0 频处、达到最大;
当补偿不完全时,补偿后信号能量仍分散在时频谱图的不同频率处,小于完全补偿时的能量。因此,可进行补偿后信号能量峰值搜索,最大值处对应完全补偿,基于此来估计旋转叶片的微动参数。
现对微动补偿原理进行说明,为简化表述,假设α=0、β=0,此时将式(5)的单叶片回波信号重写为

其中,A为信号振幅。根据式(7)的回波信号模型,构造补偿算子为

其中,Pi={ri,fri,θ0i}为待估计的微动参数集合。将式(7)与式(8)相乘得到补偿后信号

设定参数集合中各参数取值范围,搜索补偿后信号能量和的最大值,即

当完全补偿时,补偿后信号sb(t)=A,式(10)达到最大值。此时的参数集就是待估计参数的最优估计值。故通过式(10)求得的便是微动参数的最优估计值。
式(8)的补偿算子中有除法运算,当分母取值较小时受外在干扰影响补偿后的信号中会出现尖峰脉冲噪声,会影响参数估计精度。为了抑制此类噪声,将式(9)修正为

式(11)中进行了非线性变换,对原补偿后的信号除以自身的幅值,将信号中的尖峰脉冲噪声幅值衰减到1,可抑制脉冲噪声。
总回波信号模型是多目标多叶片的多分量信号时,可以采用迭代方法得到各分量信号的参数。先利用所提方法估计出最强分量的参数,接着构造出最强分量信号,从总回波中剔除掉该分量信号,重复该过程直到估计出所有信号分量参数。微动补偿参数估计算法具体步骤如下:
步骤1设置参数集Pi={ri,fri,θ0i}中各参数的取值范围、搜索步长;
多分量信号迭代进行初始化:k=1。
步骤2对雷达基带回波信号sint(t)乘以补偿算子,见式(8);
再根据式(11)修正补偿后信号。
步骤3在参数设定范围内计算补偿后信号的能量,在结果中搜索峰值得到参数估计值,见式(10)。
步骤4利用所估计的参数重构单分量信号,并从原回波信号sint(t)中剔除该分量信号。
步骤5判断是否满足条件k≥Q,不满足时迭代:k=k+1,重复步骤2~4;
直到满足条件停止。
旋转叶片微动参数估计算法的处理流程如图3所示。
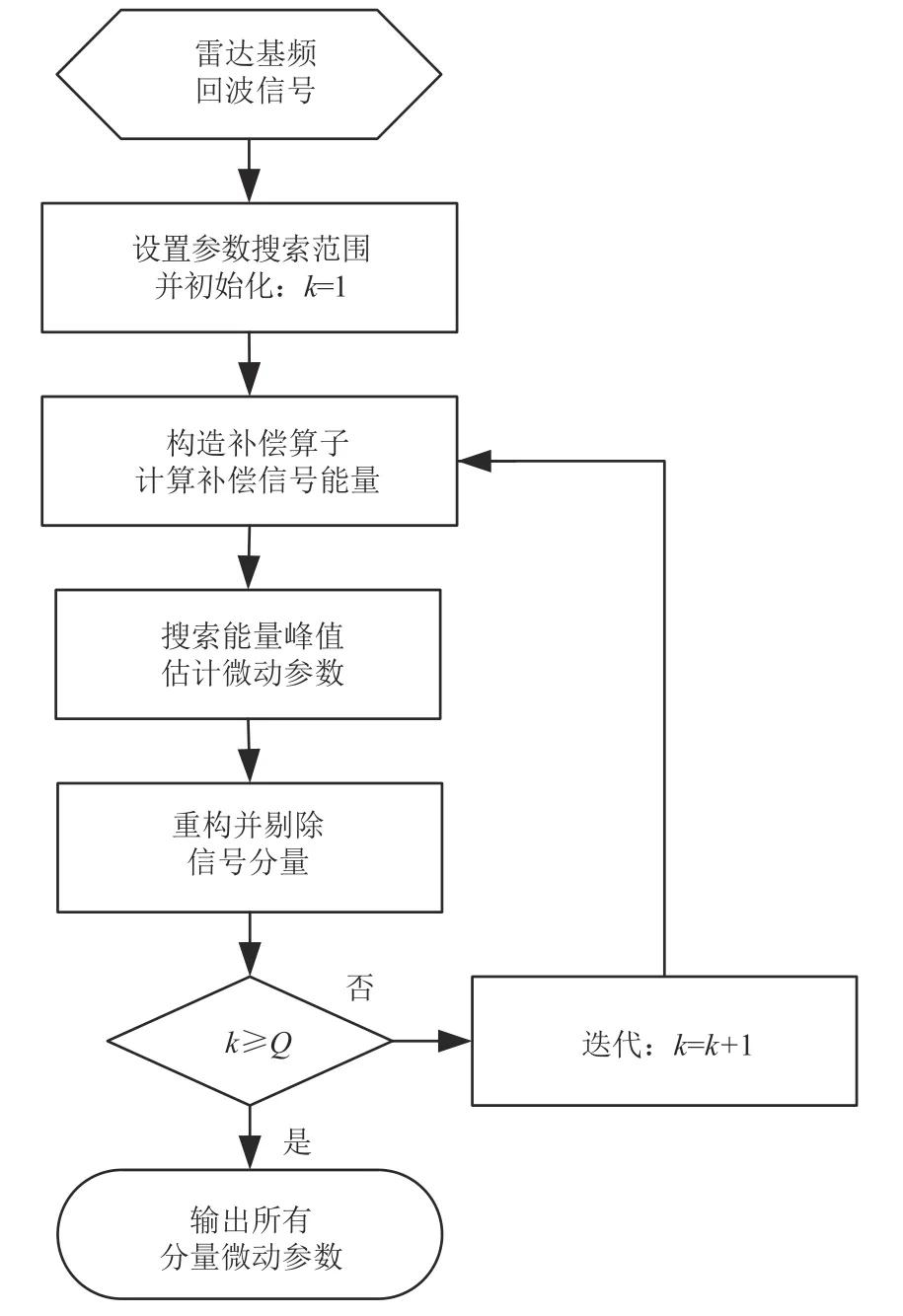
图3 算法流程图Fig.3 Flow chart of the proposed algorithm
4.1 仿真分析
设置雷达波长为0.005 m,脉冲重复频率PRF为5 kHz。两个旋转目标,俯仰角β都为0,方位角α分别为0、π/6 rad,目标主体平动已经完全补偿,第1个目标2叶片,相邻叶片相隔π rad;
第2个目标3叶片,相邻叶片相隔2π/3 rad;
采用式(6)的基带回波模型,观测时长0.5 s。目标参数具体设置如表1所示。

表1 仿真目标的参数Tab.1 Parameters of the simulated targets
旋转目标基于STFT 的时频谱如图4 所示。图中不同目标的微多普勒曲线具有不同的最大多普勒频率值,部分闪烁条重合;
目标1 的2 叶闪烁条是正负频率成对出现,而目标2 的3 叶闪烁条是正负频率等间隔交错出现。

图4 基于STFT的时频谱Fig.4 Time-frequency spectrum based on STFT
利用所提的方法估计微动参数,设置各参数搜索范围,构造微动补偿算子,频率搜索范围为1.0~6.0 Hz,步长为0.1 Hz;
旋转长度范围0~0.30 m,步长0.01 m;
初相角范围0~6.27 rad,步长0.01 rad。所提方法的参数估计结果如图5所示。图5(a)中两处峰值对应的旋转频率估值分别是4 Hz、3 Hz,对应于目标1、2;
图5(b)是目标1 的旋转长度r和初相θ0估计结果m,两叶片的初相分别为=0 rad、=3.14 rad,与目标1的参数值相同;
图5(c)中峰值处对应目标2的r和θ0估计结果22 m,三叶片的初相分别为1.57 rad、3.66 rad5.76 rad,与目标2的参数值相同。由图5可见,各目标的参数估计值与真值一致,表明了所提方法的有效性。

图5 仿真目标参数估计结果Fig.5 Parameter estimation results for the simulated targets
为说明所提方法的有效性和对不同目标参数的适应性,设置与4.1节相同的仿真条件,利用其他方法进行信号处理。文献[13]提出的基于时频谱提取最大多普勒频率方法对参数估计的结果如图6。图6中可以看出目标1的正最大多普勒频率约为949.4 Hz,目标2的负最大多普勒频率为−1616 Hz,在目标1、2的旋转频率估值分别是4 Hz、3 Hz时,反演推算出目标旋转长度的估值分别为0.094 m、0.214 m。该方法结果误差大于所提方法,这是由于时频谱图的测量结果仅能给出粗略的最大多普勒频率值,在噪声、干扰环境下测量误差更大,故基于时频谱图的最大多普勒频率提取方法不利于进行微动参数精确估计。

图6 时频谱图方法的结果Fig.6 The results of time-frequency spectrum method
图7(a)、(b)是旋转频率估值分别为4 Hz、3 Hz时闪烁现象下采用文献[20]逆Radon变换方法的结果,可以看出,整个图中无明显的聚焦点,因此闪烁条件下使用逆Radon 变换是无法估计出目标微动参数。图7(c)~(e)是理想的去除闪烁后时频谱图及其逆Radon 变换的结果,图7(d)、(e)中有明显的聚焦点,检测出峰值点即可得到微动参数估值。然而实测环境中强噪声、干扰存在时,去除闪烁的处理能力十分有限,难以完全去除闪烁,此情况下如同图7(a)、(b),此时逆Radon变换目标微动的参数方法失效。
采用本文所提方法在信噪比(signal to noise ratio,SNR)分别为0 dB、3 dB、6 dB,9 dB 时各进行100 点蒙特卡罗实验,得到旋转目标的参数平均估计值见表2 到表4。由表可以看出,旋转长度r和频率fr在SNR 为0 dB 时仍有较高估计精度,初始相位估值在SNR 为0 dB时误差较大;
但随着SNR 的增加各参数估计误差都减小,当SNR 为9 dB 时,初始相位估值也达到较高估计精度。

表2 旋转长度估计值Tab.2 Parameter estimation of rotating length

表3 旋转频率估计值Tab.3 Parameter estimation of rotating frequency

表4 初始相位估计值Tab.4 Parameter estimation of initial phase
4.2 实测实验
实测实验使用的FMCW 雷达是德州仪器公司的IWR6843 毫米波雷达系统,采用1 发4 收模式采集信号。雷达接收到的回波信号与发射信号经过混频处理和低通滤波后得到中频信号。
实验对象为一旋转的3 叶风扇,雷达与风扇之间的距离约2.4 m,风扇转速为330 r/min,即旋转频率为5.5 Hz,叶片长度为0.21 m。
实验中设置雷达参数如下:雷达波长λ=4.9 mm,中心频率fc=61.56 GHz,发射LFM 信号的调频斜率K=40.99 MHz/us,实际带宽B=2.62 GHz;
一帧数据包含128个调频周期数,脉冲重复频率为6.4 kHz,一个调频周期内的采样点数为256点,采样频率为4 MHz。方位角α=30°,俯仰角β=0。
为了获取旋转叶片参数,首先对回波数据中每个调频周期内的快时间信号进行脉冲压缩得到一维距离像,再对每个距离单元的慢时间信号进行傅里叶变换就得到了距离-多普勒像。一帧实测数据的距离-多普勒像如图8 所示。目标在第45 距离单元,在该距离单元有多普勒展宽现象,目标主体的能量远大于旋转叶片的能量,同时较小距离单元附近存在雷达系统本身带来的强静止干扰。

图8 一帧数据距离-多普勒像Fig.8 Range-Dopple imaging of one frame’s data
脉冲压缩后的信号,仅提取目标所在距离单元的信号,得到了包含目标多普勒信息的多普勒信号。图9是多普勒信号进行STFT变换后的时频谱图。

图9 STFT时频谱Fig.9 Time-frequency spectrum based on STFT
图9(a)是包含了目标主体分量的时频谱,零多普勒频率对应的是目标主体分量和静止干扰,由于主体分量和干扰的能量远远大于旋转叶片分量的能量,图中无法观察到旋转叶片分量的微多普勒频率。对原多普勒信号滤波处理,图9(b)是目标主体分量和静止干扰滤除后的时频谱,可观察出正负频率交错且等间隔周期性的闪烁条,这与三叶片时频特性的理论分析结果相符合。
采用所提微动补偿方法进行旋转叶片的参数估计结果如图10 所示。图10(a)中旋转频率估值5.6 Hz,定义参数fr估值的相对误差为er=则频率估值相对误差为0.02。图10(b)~(d)中叶片长度的估值21 m,相对误差为0,各分量的初相估值3.39 rad、5.54 rad1.37 rad。

图10 真实目标参数估计结果Fig.10 The real target’s parameter estimation results
旋转叶片的实际初始相位未知,但是三叶相邻叶片相位差是确定的,3 叶片分量的初始相位和相位差估计值见表5。表5 中相位差的取值范围设置在0~π 之间,相位差的估值与真值基本符合。因此,所提方法能有效估计实际雷达旋转叶片的旋转频率、旋转长度和初始相位值。

表5 实测数据初相相位差估计值Tab.5 Parameter estimation of initial phase difference for experimental data
旋转叶片的微动参数提取对目标类型的识别有重要意义,然而闪烁现象下的微动参数提取方法近几年才得到关注研究。本文推导了强闪烁情况下旋转叶片的回波信号模型,基于该信号模型提出了微动补偿方法,最终实现了闪烁下的旋转叶片微动参数估计。仿真分析和FMCW 雷达系统实测实验结果表明,所提方法能有效提取旋转叶片旋转频率、长度和初始相位值,参数估计精度高,为复杂背景中雷达旋转目标微动参数获取提供了一种途径。
猜你喜欢 微动频谱多普勒 多普勒US及DCE-MRI对乳腺癌NAC后残留肿瘤的诊断价值中国临床医学影像杂志(2022年5期)2022-07-26多路径效应对GPS多普勒测速的影响北京航空航天大学学报(2021年9期)2021-11-02一种用于深空探测的Chirp变换频谱分析仪设计与实现空间科学学报(2021年6期)2021-03-09基于RID序列的微动目标高分辨三维成像方法雷达学报(2018年5期)2018-12-05基于稀疏时频分解的空中目标微动特征分析宇航计测技术(2018年3期)2018-09-08经阴道彩色多普勒超声结合血β-HCG值对宫外孕早期诊断中外医疗(2016年15期)2016-12-01频谱大师谈“频谱音乐”——法国作曲家缪哈伊访谈记人民音乐(2016年3期)2016-11-07彩色多普勒超声在颈动脉内膜剥脱术后的应用中国继续医学教育(2015年5期)2016-01-07微动桥桥足距离对微动裂纹萌生特性的影响柴油机设计与制造(2015年3期)2015-12-05遥感卫星动力学频谱规划空间控制技术与应用(2015年2期)2015-06-05本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0821/642979.html



