【www.zhangdahai.com--其他范文】
赵立都,张双成,向中富,马下平,周 银,胡 川,冯红刚,陈茂霖,蒋俊秋
(1. 重庆交通大学 土木工程学院,重庆 400074;
2. 长安大学 地质工程与测绘学院,陕西 西安,710054;
3. 西安科技大学 测绘科学与技术学院,陕西 西安 710054;
4.中冶建工集团有限公司,重庆 400083)
我国地质灾害种类繁多,其中滑坡灾害作为主要的自然灾害种类,威胁着山区居民的生命和财产安全,滑坡形变监测是预防滑坡灾害最有效的方法[1-5]。利用传统的测绘仪器(如水准仪、全站仪、GNSS等)对滑坡体地表进行变化检测,工作量大,仅能监测单点形变,数据获得的完整性受地形条件制约,无法对突发性崩滑灾害进行有效监测。
地面三维激光扫描技术(Terrestrial Laser Scanning,TLS)可以获取真实场景下高精度和高密度的激光点云数据,具有全自动和非接触等诸多优势,实现了从点测量向面测量的跨越。利用TLS对滑坡变形体进行监测时,需要采集多期滑坡点云,通过比较点云的空间位置确定滑坡变形量。但点云数据具有其特殊性,每一期点云基于独立坐标系,多期点云叠差分析时基准不统一,导致滑坡体变形检测精度低、结果不可靠。目前高精度变形监测常采用球形标靶,球形标靶精度高、易于携带,但是存在价格昂贵、制造维护精度要求高等缺点,且因为激光反射角过大而引起边缘漂移。球形标靶见图1,球形标靶点云见图2,由于边缘漂移集中远离扫描一侧,即它不是均匀分布的随机噪音,这将引起球心坐标产生不可忽略的计算误差。为了克服球形标靶的缺点,本文开发了一种三棱锥标靶,可通过三个相互不平行的面实现多期点云基准统一。针对现场通视条件差、交通不便的情况,本文提出基于全站仪站点后视定向的数据采集与配准方案。
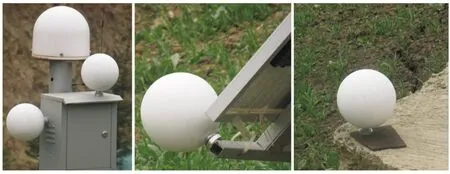
图1 球形标靶

图2 球形标靶点云
郭晨等人利用获取的机载激光雷达技术(Light Detection and Ranging,LiDAR)点云数据,结合天空视域因子的数字高程模型可视化方法,开展了地质灾害识别研究工作,并通过现场实地调查验证了机载 LiDAR 识别结果的可靠性[6]。ABELLAN 等人运用地面激光扫描技术对西班牙某危岩体进行监测,探讨了具有毫米级高精度监测的可行性[7]。KAYEN 等人采用三维激光扫描技术对日本新泻县中越地震中诱发的接近400个大型滑坡进行监测,并大大提高了震后灾害的评估效率[8]。刘卫南等人将点云密度作为滑坡表面变形的表征,提出了基于点云密度特征的滑坡位移监测方法,识别出了边坡变动区域,直观地反映了滑坡表面变形[9]。杨敏等人研究点云数据的配准精度问题,开展了复杂带状地形条件下不同扫描方案所获取点云数据的配准精度对比分析[10]。谢谟文[11]、陈金磊[12]、薛强[13]等人探讨了将TLS应用于大型、有部分植被覆盖的滑坡监测的可能性,研究了基于TLS技术的滑坡表面变形监测理论方法。
综上所述,目前将 TLS 技术应用于滑坡体变化监测尚处在探索阶段,对其进行点云数据采集模式与基准统一研究较少。鉴于此,本文提出基于固定三棱锥标靶的点云基准统一理论与方法和基于全站仪站点后视定向的点云基准统一理论与方法,以甘肃省临夏回族自治州癿藏镇3号滑坡为研究对象,采集2021年2月、2021年5月两期点云数据,验证本文所提方法的精度和可靠性。本文理论方法为滑坡灾害精准评估与预警提供理论支撑,对于地质灾害防灾减灾具有重要意义。
1.1 点云基本概念
扫描数据通常以三维坐标(x,y,z)来表示扫描点的位置信息,海量的密集点称之为点云。扫描仪坐标系如图3所示,设D为目标点至扫描仪之间的距离,θ和α分别为激光点竖直和水平角度,激光点的位置可以用极坐标表示:

(1)

图3 扫描仪坐标系
1.2 基于永久三棱锥标靶的多期点云基准统一

(2)

(1)建立两个点集的同名点对:

(3)

(2)通过最小化平方距离计算新的旋转矩阵和平移向量:
(4)
ICP算法迭代计算结束的条件是配准误差足够小或者迭代次数达到最大迭代次数,则算法终止,否则继续进行迭代。
1.3 基于全站仪后视定向的多期点云基准统一
该模式下的点云基准统一就是将点云坐标转换到全站仪确定的独立坐标系下的过程,采用布尔沙模型坐标转换。根据空间直角坐标转换的布尔沙模型,任一个控制点在点云空间直角坐标系1中的坐标通过3个平移参数ΔX0、ΔY0、ΔZ0,3个旋转参数ωx,ωy,ωz和1个尺度比参数m可转换为全站仪空间直角坐标系2中的坐标,即有:
(5)
2.1 研究区域
癿藏镇3号滑坡位于甘肃省积石山县癿藏镇以南拉沙沟村黄土滑坡上,地理坐标:35°35′23″E, 102°57′12″N。滑坡体主要地层为全新统残坡积粉质粘土,滑床主要地层为中下更新统河湖相褐红色粉质粘土。滑体中部宽60~100 m,轴长80~130 m,面积约25 000 m2,厚度3~8 m,体积约15×104m3,属中浅层中小型滑坡群。滑坡后壁高0.2~0.4 m,自然坡度15°,主滑方向85°。滑坡群前缘坡体仅表层1~3 m溜塌流泥为主破坏,下部土体较稳定,后缘呈圈椅型尖状及平缓圆弧状,属于牵引式粘性土滑坡。滑坡全貌见图4,3号滑坡主要病害见图 5。图5b为宽10 cm裂缝局部图,图5c为滑坡形成的路面垂直方向0.6 m的错台位移局部图,图5d为滑坡形成的道路裂缝局部图。

图4 癿藏镇3号滑坡滑坡全貌

图5 癿藏镇3号滑坡病害
2.2 数据采集
本文使用Leica P50地面三维激光扫描仪进行数据采集,该扫描仪为一款中长距离测程的地面三维激光扫描仪,具有恶劣环境下可以获得高质量点云数据、扫描范围广且噪音极小等优点。扫描仪相关参数见表1。另外,辅助数据采集的控制测量仪器还包括Leica TS30全站仪 1 台、棱镜球等。

表1 Leica P50三维激光扫描仪技术参数
滑坡蠕动变形是一个缓变动态过程,本文采用一站测量法,避免多站数据拼接带来的误差,有效保证了多期数据对比的可靠性,提高了滑坡变形监测的精度。确定测站点位置时要考虑通视、最大入射角和最大扫描范围,因此仪器架设在滑坡体对面山坡最高点上,扫描精度设置为3 mm @10 m。考虑到冻土消融等因素对滑坡影响,分别于2021年 2 月 26日(冻土消融前,现场温度3 ℃)和2021年 5 月 3 日(冻土消融后,现场温度28℃)采集2期点云数据,分析滑坡位移。任选一期(第2期)滑坡变形体点云见图6,其中点个数为18 217 525个。
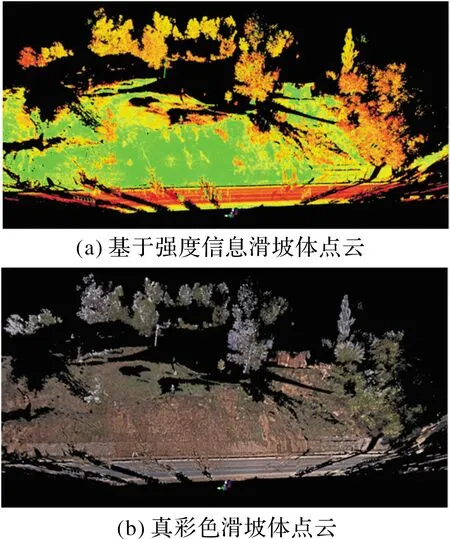
图6 滑坡变形体点云
2.3 数据处理
2.3.1 基于永久三棱锥基准统一数据处理
本文开发了一种三棱锥标靶,三棱锥模板尺寸为每个等边三角形边长50 cm,高15 cm。在稳定区共浇筑3个混凝土三棱锥,其中任意一个三棱锥标靶见图7,三棱锥标靶点云见图8。

图7 三棱锥标靶

图8 三棱锥点云
基于三棱锥点云的提取原理如图 9所示,可通过三棱锥点云拟合出三个平面,通过3个平面可交会出三棱锥顶点。

图9 三棱锥点云提取原理
分别基于两期点云数据拟合三棱锥顶点坐标,第1期点云数据中3个三棱锥各拟合的顶点见表2,第2期点云数据中3个三棱锥各拟合的顶点见表3。

表2 第1期点云三棱锥标靶顶点坐标

表3 第2期点云三棱锥标靶顶点坐标
滑坡体2期初始点云见图10,基准统一时,采用ICP算法求得的平移向量为(0.134,0.080,-0.038),本文将旋转矩阵转换为绕坐标轴旋转角度,其中绕x轴旋转角0.164°,绕y轴旋转角-0.180°,绕z轴旋转角度-46.886°,运用所求旋转和平移参数使得基准统一后的点云见图11,滑坡变形体照片见图12。可以看出,两期点云基于特征标靶三棱锥已精确配准。两期点云基准统一,为后续滑坡变形量探测奠定了良好的基础。该理论方法简单实用、效率与精度高。
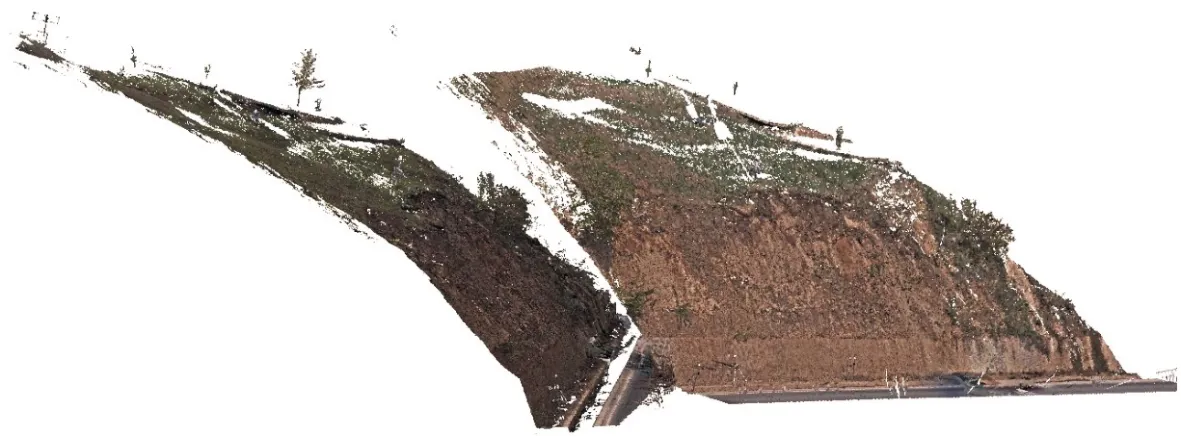
图10 滑坡体两期初始点云图

图11 两期基准统一后的滑坡体局部点云

图12 滑坡变形体照片
2.3.2 基于全站仪后视定向基准统一数据处理
在滑坡等变形体监测中,需要以稳定区的点为监测基准,本文稳定区4个控制点坐标见表4。

表4 控制点坐标
基于全站仪站点坐标后视法扫描模式进行数据采集时,其实际操作需要分为三个步骤展开:
(1)全站仪采集滑坡区监测点坐标。将全站仪架设在任意位置,后视稳定区任意两个以上控制点坐标,交会得到全站仪当前架设测站点坐标,再测量得到位于滑坡区3个监测点棱镜球的棱镜中心坐标,棱镜球照片见图13。

图13 棱镜球标靶
(2)运用地面三维激光扫描仪数据拟合得到监测点坐标。将三维激光扫描仪架设在任意位置,扫描并拟合得到3个监测点棱镜球点云的球心坐标。利用布尔沙模型可求出点云坐标系转换为全站仪坐标系的坐标转换参数。
(3)运用所求出的坐标转换参数将每一期点云坐标转换到稳定区控制点坐标系下,实现基准统一。
运用全站仪后视定向理论方法精确配准后的点云见图14。两期点云已精确转换为稳定区控制点坐标系下,实现了多期点云基准统一。该方法理论严密、实践中便于操作,不受滑坡体地形条件限制、适用性广。进一步分析了两期点云基于标靶特征的配准精度,基于三棱锥标靶配准精度为0.003 m ,基于全站仪站点后视定向的点云配准精度为0.005 m。
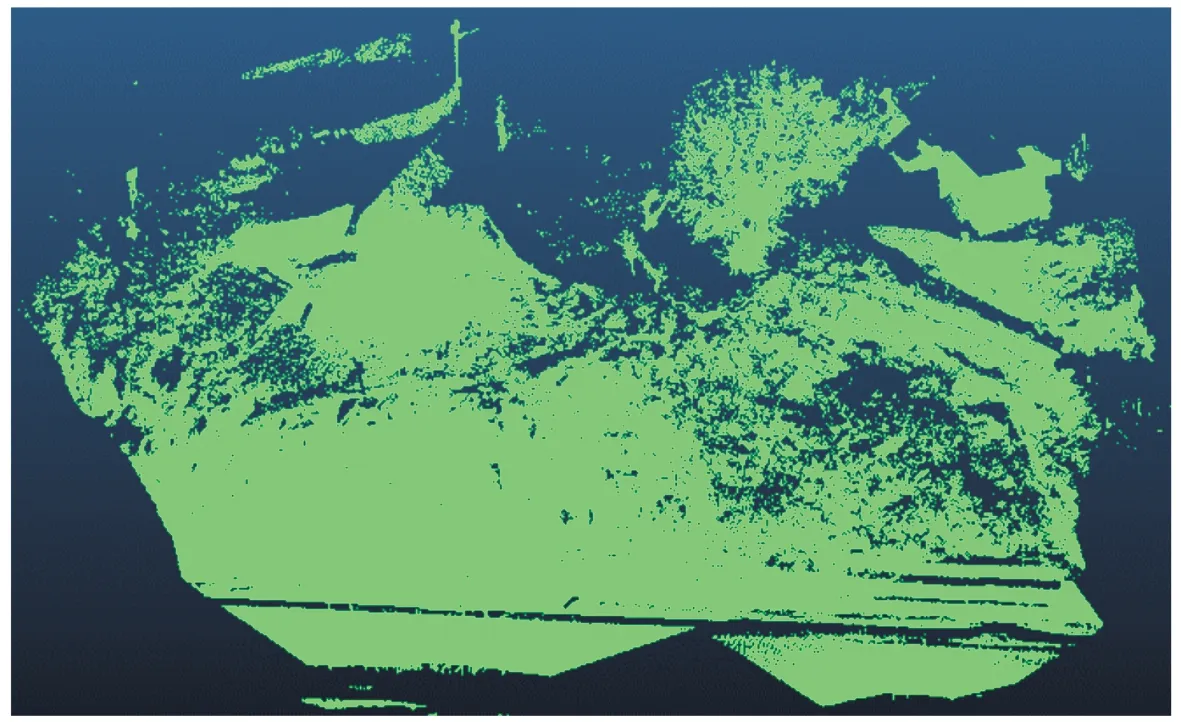
图14 精确配准后的点云
综合对比两种点云基准统一理论与方法,可得:
(1)从外业数据采集方面来看,为了保证配准精度,在同样范围的测区中,基于固定三棱锥标靶数据采集模式,操作简便快速,适用于通视性好、便于浇筑混凝土的环境条件。基于全站仪站点后视定向点云数据采集模式,不受现场条件限制,适用性广。在稳定区有控制点的情况下,可有效地将点云直接测算至已有坐标系中,这对基于点云数据的滑坡灾害体持续动态监测有重要意义。
(2)从点云基准统一来看,基于固定三棱锥标靶和基于全站仪后视定向的基准统一理论严密、配准精度高。基于全站仪站点坐标的后视定向优势在于可以将点云转换到已有的控制点坐标系下,对测区工程利用较为有利,但是全站仪观测值误差会直接代入到点云的坐标值中,全站仪获得的测站坐标值的精度将直接影响着点云精度。
本文采用TLS技术获取滑坡变形体点云数据,提出了基于永久三棱锥和基于全站仪后视定向两种基准统一方法。为验证本文所提理论方法的精度和可靠性,选取甘肃省临夏回族自治州癿藏镇3号滑坡为研究对象,结论如下:
(1)基于永久三棱锥基准统一理论方法的三棱锥顶点配准精度为0.003 m,基于全站仪站点后视定向基准统一理论方法的棱镜球配准精度为0.005 m。本文所提方法精度高、理论严密,其中基于永久三棱锥基准统一理论方法克服了球形标靶边缘漂移问题,基于全站仪站点后视定向基准统一理论方法解决了配准处理时为找重叠区域同名点对数据采集要求苛刻的弊端,解决了全局坐标系转换困难的问题,对现场通视要求不高,适用性广。
(2)基于永久三棱锥基准统一方法和基于全站仪站点后视定向基准统一方法外业操作简便,效率高,其在滑坡区中的成功应用对三维激光扫描技术在滑坡等灾害变形监测的深度应用和有效推广有重要借鉴意义。
猜你喜欢 标靶三棱锥全站仪 面切割结合k-means聚类的测点自识别隧道监测方法铁路技术创新(2022年3期)2022-10-27工程测量中智能化全站仪的应用解析新型工业化(2022年5期)2022-06-17美媒:在中国沙漠发现第二个“美国航母标靶”文萃报·周五版(2021年45期)2021-11-17三棱锥中的一个不等式福建中学数学(2018年1期)2018-11-29全站仪在工程放线验线中的应用分析居业(2017年5期)2017-07-24浅谈全站仪在建筑测量质量控制中的应用研究现代职业教育·中职中专(2016年4期)2016-10-21美国大选永远的“标靶”世界博览(2015年20期)2015-09-10全站仪在矿山测量中的应用科技视界(2014年11期)2014-12-23一种平面靶心的提取算法*大地测量与地球动力学(2014年3期)2014-02-13两道三棱锥题目的探究中学数学杂志(高中版)(2008年4期)2008-07-31本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0610/609466.html



