【www.zhangdahai.com--其他范文】
胥柯,向路平,胡杰,杨鲲
(电子科技大学信息与通信工程学院,四川 成都 611731)
随着下一代无线网络技术的发展,接入互联网的设备将呈现井喷式增长。据估计,到2025年,入网设备数量将达到7 544亿台[1],这将给许多场景带来新的通信问题[2]。尤其是随着近些年车联网和自动驾驶技术的发展,高移动性的车辆对通信质量有着较高的要求,这一问题逐渐引起学术界的关注。现在普遍认为通信感知一体化(integrate2 sensing an2 communication,ISAC)是解决这一问题的关键技术。
雷达感知最初应用于军方,利用雷达在空间中周期性地扫描来搜索目标,这一思想刚好可以应用在车辆感知定位中。然而,随着电子元器件的发展和对通信资源的需求,已经实现了更高频段的通信,这在给人们带来更令人满意的服务的同时,也占用了雷达的一些频率资源,5G毫米波的频段已经接近于某些雷达的工作频段,随着频率的增加,通信会给雷达带来更大的干扰。但是通信系统和雷达系统之间相似的信道特性也促进了二者的结合,即ISAC。ISAC的概念最早在1960年[3]被提出。自1990年以来,受大规模天线技术发展的推动,ISAC也得到了进一步发展。大规模天线通信和大规模天线雷达极大地提高了通信速率、自由度(2egree of free2om,DoF)和雷达感知精度,这使得ISAC具有很高的实用价值[4-6]。
ISAC被认为在人机交互、车联网[7](vehicle- to-everything,V2X)、遥感、流量控制[8]和环境检测[9]方面很有前景。现有的ISAC系统的实现方法可以归纳为资源分配和集成设计。一种方法是把通信资源划分为两个正交的部分,分别用于通信和感知[10]。然而,这并不能很好地利用频率资源,因此感知和通信系统的集成是发展的必然趋势,一个最优的波形设计能够在保证感知精度的同时实现最佳的通信速率。Roberton等[11]和Han等[12]开创性地使用了啁啾(chirp)信号和频率/相位编码波形来实现ISAC系统。Liu等[13]研究了一种双功能的多天线雷达通信系统。Sturm等[14]基于正交频分复用(orthogonal frequency 2ivision multiplexing,OFDM)技术提出了一种智能波形设计方法,可以同时进行数据传输和雷达感知。然而,在高移动性场景下的通信具有多普勒频移,这会降低OFDM的通信性能[15]。针对这一问题,Ha2ani等[16]提出了一种新的波形设计技术——正交时频空间(orthogonal time frequency space,OTFS)调 制,这 种 波 形 将 信 息 从 时 频(time-frequency,TF)域转换到时延多普勒(2elay-2oppler,DD)域进行传输。此外,通过OTFS波形雷达可以准确地感知到反射体的范围、速度和角度信息,通过这些信息可推断出由时延和多普勒频移组成的信道状态信息。因此,OTFS波形被认为是ISAC系统中极有前景的波形之一。Gau2io等[17-18]介绍了基于单天线和多天线的OTFS-ISAC系统,并证明了OTFS技术在ISAC系统中的优越性。目前学术界已经有许多OSFS与ISAC结合的研究成果,例如,Bu等[19]提出了一个独立于通信数据符号和非接口的OTFS通感一体化系统,简称OTFS-ISAC系统。
ISAC系统在高速移动场景中的应用也受到了广泛关注。Yuan等[20]提出了一种在路侧单元(roa2 si2e unit,RSU)传输OTFS-ISAC信号的方案,并根据回波估计车辆的参数。Raviteja等[21]基于OTFS提出了一个低复杂度的匹配滤波算法,在雷达发送系统中估计目标的距离和速度。不同于匹配滤波,Gau2io等[22]也提出了一种能在雷达OTFS调制中有效估计目标距离和速度的算法,并且为了使OTFS-ISAC的设计更符合实际情况,其在设计ISAC系统的同时考虑了发射机和雷达目标之间信道中视距(line-of-sight,LOS)传输和非视距(non-line-of-sight,NLOS)传输的结合。Sturm等[14]考虑了雷达感知中不能直接获得信道条件的场景,提出了基于空间扩散OTFS的ISAC系统。
然而,据本文调研,现有的工作还没有完全挖掘出通过雷达感知辅助通信的潜力,当前的OTFS-ISAC系统并没有对多用户通信做出设计;
此外,在高移动性的车联网中,目前提出的OTFS-ISAC系统仍然仅考虑正交多址接入(orthogonal multiple access,OMA)。然而,非正交多址接入(non-orthogonal multiple access,NOMA)技术正是为了多个用户使用相同的TF资源块而设计的,能进一步提高频谱利用率和系统容量[23]。NOMA技术的主要思想是通过控制功率区分不同的用户。Ding[24]研究了NOMA辅助的OTFS系统,设计了一个高移动性用户和多个低移动性用户共享频谱的波束设计方案。
本文考虑一种带有用户公平性保证的OTFS-ISAC系统,在车辆高速移动场景下为多个车辆提供公平性服务。在该场景下,基站接收被车辆反射后的OTFS-ISAC信号回波后,对其进行分析以获得车辆运动参数。不同路径信号的时延和多普勒频移不同,因此基站可以通过回波推导出车辆的距离和速度,同时角度信息可以通过多天线技术获得。基于上述获得的参数,基站可以建立车辆运动的移动拓扑模型,并对其进行实时校正以保证其精度。在车辆移动拓扑模型的指导下,基站进行NOMA功率分配。本文的主要贡献如下。
(1)提出了一种适用于高移动性车联网的OTFS-ISAC系统设计方案,为了提升系统整体通信性能,本文利用NOMA技术设计了多用户场景下的功率分配。
(2)在通过雷达获得车辆速度、距离和角度等运动信息的基础上,提出了一种建立车辆运动拓扑的方法,能够实时追踪车辆的位置。
(3)推导出在保证不同车辆公平性的前提下,功率分配问题的封闭解。仿真结果表明,本文提出的基于OTFS-ISAC的非正交多址接入系统具有很强的优越性。相比于无雷达感知辅助的非正交多址OTFS系统,基于OTFS-ISAC的非正交多址接入系统实现了25%的信息速率提升。
基于OTFS-ISAC的非正交多址接入系统模型如图1所示,一个基站为P辆车提供服务。其中,每辆汽车配备单根接收天线,而基站配有两组多天线,一组共Nt根发送天线用来给汽车下行发送OTFS-ISAC信号,另一组共Nr根接收天线用来接收汽车的反射回波,假设 Nt=Nr,且回波和下行传输之间不存在信号干扰,此外,本文还假设车辆不会互相遮挡,并且在移动的过程中相互独立。

图1 基于OTFS-ISAC的非正交多址接入系统模型
基于OTFS通感一体化的NOMA传输流程如图2所示。基站向下行车辆发送OTFS-ISAC信号()s t。车辆在接收信号()s t后开始进行解调等操作,此时车辆表面反射回波。基站在接收回波后,通过回波分析车辆的位置和速度。基站预测车辆在下一时刻的位置和速度,然后,NOMA辅助基站功率分配向下行发送OTFS-ISAC信号,循环上述流程,以此实现基站对车辆实时的位置估计和通信。

图2 基于OTFS通感一体化的NOMA传输流程
1.1 OTFS-ISAC信号
首先,基站发送给第i辆车的信息经过DD域调 制 后 得 到OTFS信 号xi[k,l]。其 中k = 0,1,…, N -1,l = 0,1,…, M-1,分别为多普勒系数和时延系数,M和N分别为子载波数和时隙数。然后将P辆车的发射信息累加,即基站发送的OTFS信号为再通过逆辛有限傅里叶变换(inverse symplectic finite Fourier transform,ISFFT)将信号从DD域转换到TF域,过程如式(1)所示。
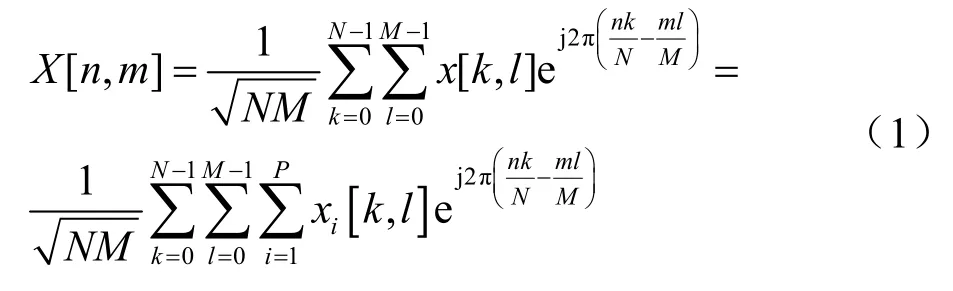
其中, n = 0,1,… , N -1,m = 0,1,… ,M-1。
最后,X[n,m]利用理想矩形发射脉冲gt(t)进行海森堡变换,转换为时域连续波形s(t),过程如式(2)所示。

1.2 雷达感知
通常而言,一个基站需要为大量的车提供服务,但在使用波束成形技术时,射频链路的数量决定了不同数据流的个数。有限的射频链路使得基站不可能通过单独的窄波束向每辆车发送单独的数据流。本文考虑了在大规模车辆下,一定存在需要一个数据流服务多辆车的场景。
为了实现基站对P辆车的服务,本文采用波束成形技术来对准不同的目标。假设基站的每个天线发送相同的信号s(t),发射信号矩阵为s(t)。通过波束成形技术发送的电磁波可以集中在θi方向上,其中θi为第i辆车的相对基站方向,i ∈[1,… , P]。因此基站对第i辆车传输的信号为:


其中,βi、νi、τi分别为基站和第i辆车之间的反射系数、时延和多普勒频移。因此,雷达的回波信号可以表示为:

基站收到不同车辆的回波信号后,采用经典的多重信号分类(multiple signal classification,MUSIC)算法对车辆相对于基站的角度进行估计。然后采用匹配滤波算法对速度和距离进行估计,该方法在满足准确度的要求下具有较低的复杂度。通过匹配滤波的方法可以获得信号的时延和多普勒频移。匹配滤波可以表示为:

其中,Totfs为OTFS-ISAC信号的持续时间。对其匹配滤波后,在对应的时延和多普勒处出现较强的相关性。时延τi对应了车辆与基站之间的距离,同时多普勒νi为车辆的移动速度,多普勒的正负表示车辆移动的方向。
1.3 移动拓扑
不失一般性,本文建立了一个通用的移动拓扑模型,如图3所示,车辆和基站的距离为d,车辆此时从左向右行驶,速度为μ,车辆位于与基站中轴线夹角为θ的方向。

图3 移动拓扑模型
假设匹配滤波后得到车辆回波的时延和多普勒,分别为τ0、ν0。c和fc表示光速和载波频率,则车辆和基站的距离d和车辆移动速度μ分别为:

车辆在车道上移动时只有两个方向,多普勒偏移当车辆从左往右移动时为正,从右往左时为负。假设t时刻车辆的位置、移动速度和角度分别为dt、μt和θt,同时传输一帧OTFS的时间为Totfs。假设估计的下个时刻1t+的位置为:

通过这个位置估计辅助1t+时刻的下行通信,并在1t+时刻的回波到达时纠正当前估计,然后再次估计下个时刻。
1.4 通信性能
与雷达下行反射的信道不同,通信信道是从基站到车辆的下行信道。在完美信道的假设下只考虑主路径,可以描述为:

其中,hi表示信道的大尺度衰落。因此,车辆接收信号可以描述为:

其中,yi(t)表示第i辆车传输的信息,w(t)为符合高斯分布的白噪声。信号同步后,将接收信号通过发射脉冲gr(t)进行维格纳变换,将接收信号从时域映射到时频域,具体如下。

再将时频域离散信号Yi[n,m]进行辛有限傅里叶变换(symplectic finite Fourier transform,SFFT),第i辆车得到DD域信息恢复信号yi[k,l]为:

传统NOMA通信分为基站上、下行通信。其中基站下行向车辆进行信息传输时,需要在帧头加入导频信息来保证下行信号能够成功解调。并且NOMA功率分配的前提是基站知晓大尺度衰落信息,所以需要车辆向基站上行发送自身位置信息。但是在OTFS-ISAC系统中这两个关于NOMA传输的问题将得到解决。第一,在基站通过感知获取车辆的距离和速度信息后,可以估计从基站到车辆进行OTFS传输的时延多普勒信道。在基站通过雷达感知回波信号得到信道大尺度衰落信息后,可以在基站端对信息进行预处理,使得车辆端跳过使用导频估计信道的过程。第二,基站可以实时通过回波修正当前车辆的位置,从而省去了大量的上行传输开销,提高了整体系统的信息速率。传统NOMA系统和基于OTFS-ISAC的NOMA系统的帧结构如图4所示。
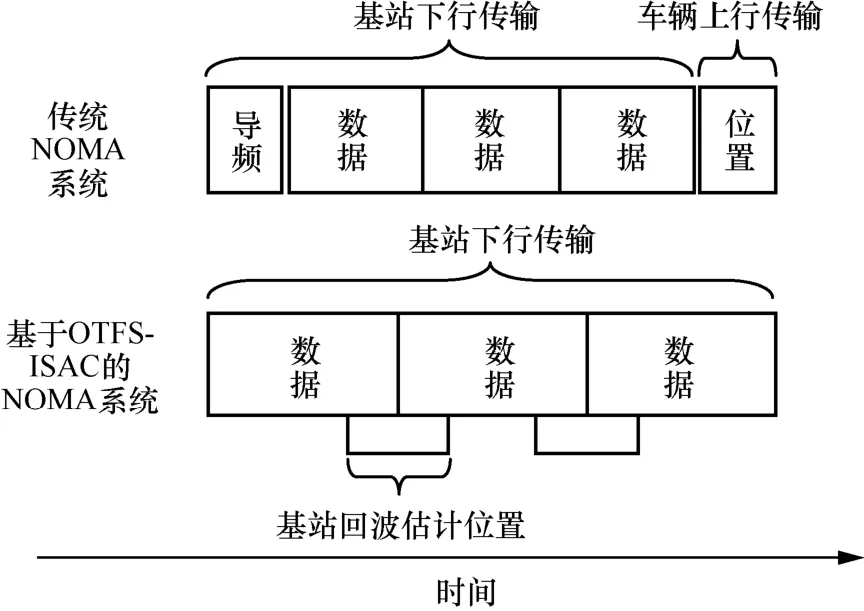
图4 传统NOMA系统和基于OTFS-ISAC的NOMA系统的帧结构
在同一个数据流的前提下,使用NOMA保证多辆车的通信速率的公平性,并提升系统整体的信息速率。在通常的NOMA问题中,针对多用户问题,一般先对用户进行两两分组来确保串行干扰消除(successive interference cancellation,SIC)的成功率,在组与组之间采用正交的方式进行区分[25-27]。在车辆的动态移动中,可以将距离相近的车辆进行动态两两分组,只考虑组内功率分配问题。
本文考虑下行OTFS-ISAC信息传输阶段的NOMA系统,车辆1(U1)和车辆2(U2)接收的是叠加后的基站发送信号。假设U1和U2在同一组内,同时信道系数hi仅与基站和第i辆车之间的大尺度衰落相关。不失一般性地,假设信道h1≤h2,同时,在完美信道的假设下,基站和车辆之间的通信信道由LOS主导,不考虑NLOS。此外,假设基站可以准确估计车辆的位置。因此,信道系数可以描述为:

其中,tG、rG分别是发送天线和接收天线增益,λ是波长,id表示车辆i和基站的距离。
在NOMA系统下,U1和U2的通信速率可以描述为:

其中,0n表示高斯白噪声,1α和2α分别是分配给U1和U2的功率,R1和R2分别是U1和U2使用连续干扰消除技术后的可达速率。U2的信道条件较好,可以先去除U1的干扰,但是U1传输信息时需要将U2的信息视为干扰。
在NOMA功率分配中,信道的先验知识是非常重要的。不同车辆的信道状况影响着车辆的信息解调顺序,只有在已知不同车辆的信道强弱情况下,才能进行顺序干扰消除。本文首先说明NOMA分配中车辆解码消息和信道的内在联系,假设是U2解码发给U1信息的可达速率。根据先验条件h1≤h2,R
2→1≥R1,因此具有更好信道条件的U2可以通过解调U1的信息消除干扰。在U2消除了U1的干扰后,就能获得更高的信息速率。
在实际的应用场景中,一般情况下所有的通信应该是平等的,所有车辆应该享受相同的服务,这样才能让大多数车辆满意。在完美信道下,最大最小公平(max-min fairness,MMF)问题可以描述为:
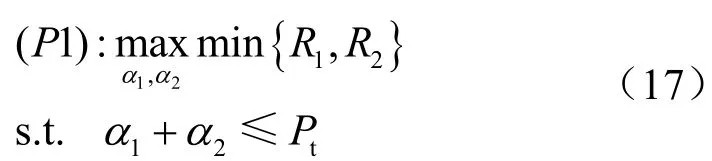
该问题的目标函数是最大化系统中信息速率最小的下界,以此保证不同车辆的公平性。其中两辆车的发射功率之和小于或等于最大发射功率tP。
想要求得这个问题的最优解,需要先对限制条件进行进一步的限定。一般来说,只有当基站达到最大的发射功率时系统才能达到最佳的性能,所以限制条件变为α1+α2=Pt。首先给出这个问题最优解的封闭解,然后对这个解的最优性进行证明。当两辆车的信息速率相等(R1=R2)时,达到MMF问题的最优解。令α1=Pt-α2,能得到等式:
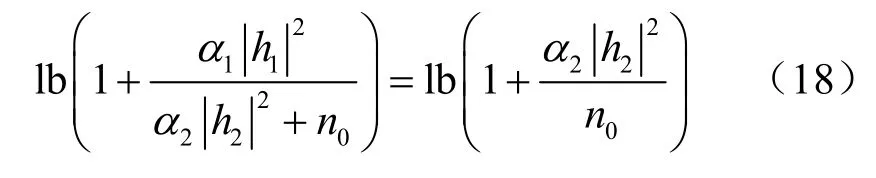
解出式(18),能获得两个关于α2的解。因为20α≥,舍去其中的负数解后,最优解为:

进一步地,说明其最优性。首先根据两辆车的速率表示可知:U1的速率随着α2的增加而单调减小,U2的速率随着α2的增加而单调增加。当且仅当α2=α2
*、α1=Pt-α2
*时,U1和U2的速率相等。假设MMF问题的最优解为α2
0, α1
0
=Pt-α2
0,第一种情况:α2
0
≥α2*,此时易知两辆车的信息速率满足R2≥R1。目标函数变为了最大化R1,通过不断缩小α20增大R1,直到α2
0
=α2
*获得最优解。第二种情况:α2 0 ≤α2
*,此时两辆车的速率满足R1≥R2。目标函数变为最大化R2,通过不断增大α20增大R2,直到α20 = α2
*获得最优解。综上所述,α2=α2
*,α1=Pt-α2
*即MMF问题的最优解。
本文的系统仿真参数见表1,仿真实验结果说明,系统的整个工作流程包括信道感知通信目标、移动拓扑模型建立、NOMA公平性功率分配和性能对比。本文将研究匹配滤波方法在估计物体及距离和速度信息的表现、运动估计与真实的差异、信噪比和通信距离对NOMA功率分配系统的影响。

表1 系统仿真参数
匹配滤波方法检测两个目标的性能表现如图5所示。两个目标的初始和基站距离分别为7 m和15 m,初始速度分别为8.3 m/s和13.9 m/s(30 km/h和50 km/h)。可以看出,在对回波进行匹配滤波后,两个物体表现为两个拱形。在距离维度上为两个点,在目标对应的距离上出现相关性,但是在其他距离上的值很小可以忽略。两个目标的估计位置分别为6.98 m和14.51 m,在位置的估计上已经非常高,误差约为2%。在速度维度上呈现一个拱形,在最高点匹配的匹配滤波相关性最大。所以本文选取最高点作为估计值,映射到速度维度,两个目标的估计分别为8.28 m/s和13.86 m/s。速度估计误差为0.2%。在实际使用中考虑到车辆尺寸和波束宽度,这样的精度已经满足车联网的通信和感知需求。

图5 匹配滤波方法检测两个目标的性能表现
车辆运动估计值和真实值的比较如图6所示,实线表示对车辆速度的长期估计,虚线表示对位置的长期估计,S表示速度曲线,P表示位置曲线,E表示估计值,例如,表示车辆1的速度估计曲线,PU2表示车辆2的实际位置曲线。可以看出,车辆1和车辆2的真实速度在12 m/s和 10 m/s左右随着时间浮动,系统对车辆的速度能够准确预估并跟随。在图6中两辆车的初始位置并不相同,两辆车相向而行,在约1 s处相遇,随后分开。比较两辆车的真实位置和估计位置,可以得出系统能够准确还原车辆位置的结论。

图6 车辆运动估计值和真实值的比较
不同信噪比(signal noise ratio,SNR)下不同系统信息速率的比较如图7所示,这里的SNR指两辆车到达的平均值。U1和U2与基站之间的距离分别为15 m和7 m。实线和方块分别表示单台车辆1和车辆2的信息速率;
圆圈虚线表示基于OTFS-ISAC的NOMA系统,为本文提出的NOMA辅助的公平性通感一体化系统;
星点虚线表示无雷达辅助的传统NOMA系统;
菱形虚线表示基于OTFS的OMA系统。如图7所示,随着SNR从5 2B增加到40 2B,车辆的信息速率在保持相同的同时从0.5 bit/(s·Hz)增加到6.4 bit/(s·Hz),保证了其公平性。其他曲线均是两辆车的信息速率之和。在SNR为20 2B时,无雷达感知辅助的OMA、传统NOMA系统和基于OTFS-ISAC的NOMA系统的速率分别为2.7 bit/(s·Hz)、4.7 bit/(s·Hz)和5.9 bit/(s·Hz)。无雷达感知辅助的传统NOMA系统相对于OMA系统提升约74%的信息速率,而本文提出的基于OTFS-ISAC的NOMA系统在无雷达感知辅助的传统NOMA系统的基础上提升了约25%的信息速率,因为通感一体化系统能够通过OTFS回波信号得到基站与车辆的距离和车辆的速度。OTFS-ISAC系统在基站端可以根据得到的信道的先验知识预先对数据进行处理,使得接收端跳过信道估计和均衡。这样基于OTFS-ISAC的NOMA系统在下行传输时可以不插入导频来辅助车辆的信道估计。此处使用的OMA系统在运行时不仅需要均分时隙对两辆车进行服务而且需要插入导频来辅助通信。并且传统NOMA系统能够正常工作的前提是基站通过回波信号预测了基站和车辆之间下一个时刻的距离。无雷达感知辅助的传统NOMA系统需要车辆通过上行传输向基站发送估计的位置信息,而基于OTFS-ISAC的NOMA系统则是不需要这部分开销的。综上所述,基于OTFS-ISAC的NOMA系统要优于无雷达感知辅助的传统NOMA系统,并且它们都优于OMA系统。

图7 不同信噪比下不同系统信息速率的比较
不同距离下不同系统通信速率的比较如图8所示。在固定车辆1到基站的距离为15 m,固定信号噪声大小符合在车辆1和车辆2距离基站分别为15 m和13 m时,SNR为20 2B。改变车辆和基站之间的距离来观察系统信息速率的变化。由图8可知,在车辆2不断靠近的过程中,所有系统的信息速率均在提高。并且在车辆1位置不变的情况下,由于车辆2和基站的距离从10 m减小到5 m,车辆1的信息速率从2.9 bit/(s·Hz)提升至3.7 bit/(s·Hz),且二者变化保持一致,系统的公平性得到了保证。车辆2距离为5 m时,基于OTFS- ISAC的NOMA系统、无雷达辅助的传统NOMA系统和基于OTFS的OMA系统的信息速率分别为7.4 bit/(s·Hz)、5.2 bit/(s·Hz)和3.4 bit/(s·Hz)。在车辆2不断靠近的过程中,不同系统下的信息速率相较于初始值都提升26%左右。

图8 不同距离下不同系统信息通信速率的比较
本文考虑了一种带有用户公平性保证的OTFS通感一体化系统,简称OTFS-ISAC系统,在车辆高速移动场景下为多辆车提供公平性功率分配服务。在该场景下,基站接收到被车辆反射后的OTFS-ISAC信号回波,然后对其分析获得车辆运动参数。由于不同路径的信号时延和多普勒频移不同,基站可以通过回波预测出车辆的距离和速度,同时角度信息可以通过多天线技术获得。基于上述获得的参数,基站可以建立车辆运动的预测拓扑,并对其进行实时校正来保证其精度。在车辆预测拓扑的指导下,基站采用NOMA进行公平性功率分配。仿真结果表明,相比于无雷达感知辅助的非正交多址OTFS系统,基于OTFS-ISAC的非正交多址接入系统能在保证车辆功率分配公平性的同时实现25%的信息速率提升。本文优化问题考虑的是完美信道假设情况,在接下来的工作中可以考虑非完美信道的鲁棒性设计。
猜你喜欢 公平性信道速率 上行MIMO-OFDM系统中基于改进GAIC算法的稀疏信道估计软件导刊(2019年7期)2019-10-11核心素养视阈下中小学课堂评价的公平性研究福建基础教育研究(2019年6期)2019-05-28一种基于向量回归的无人机通信信道选择方法软件导刊(2018年1期)2018-02-01关于Wifi机顶盒在高密集区域中信道部署的研究中国新通信(2017年12期)2017-07-16云环境下能耗感知的公平性提升资源调度策略计算机应用(2016年10期)2017-05-12盘点高考化学反应速率与化学平衡三大考点中学化学(2016年10期)2017-01-07提高职工医保统筹层次的必要性及其难点分析中小企业管理与科技·上旬刊(2016年12期)2017-01-05WLAN和LTE交通规则CHIP新电脑(2016年3期)2016-03-10化学反应速率与化学平衡考点分析中学化学(2015年8期)2015-12-29通过提高心理速率改善记忆祝您健康(1985年1期)1985-12-29本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0425/589367.html



