【www.zhangdahai.com--其他范文】
吕书锋, 李宏洁, 张 伟, 宋晓娟
(1. 内蒙古工业大学 力学系,呼和浩特 010051;
2. 北京工业大学 材料与制造学部 机械结构非线性振动与强度北京市重点实验室, 北京 100124;
3. 内蒙古工业大学 机械工程学院,呼和浩特 010051)
航空航天领域中的很多结构都可以简化为悬臂板模型,如飞机机翼、火箭翼和太阳能帆板等,在外部激励作用下,这类结构极易发生由于振动导致的失稳等问题,对飞行稳定性和工作精度等造成重大影响。功能梯度材料(functionally graded material ,FGM)具有较高的强度和韧性,可作为飞行器的蒙皮材料以提高壁板结构的刚度,再结合有效的控制策略可以极大改善悬臂板结构的动力学稳定性。因此,开展功能梯度悬臂板结构的动力学特性及振动抑制研究具有非常重要的理论和工程应用价值。许多学者已经对FGM板壳的振动特性问题进行了研究。尹硕辉等[1]基于一阶剪切变形板理论,采用等几何有限元法,讨论了体积分数指数、边界条件及长厚比对金属陶瓷功能梯度板自由振动频率的影响。周凤玺等[2]运用打靶法数值求解了功能梯度矩形板自由振动特性。Yang等[3-4]运用一维微分求积法、伽辽金法,分析了热环境下初始应力功能梯度板的自由振动和强迫振动特性,以及在分布脉冲横向荷载作用下初始应力功能梯度矩形薄板在弹性基础上的动态响应。Huang等[5]基于高阶剪切变形板理论,研究了带有压电层的功能梯度板在热环境下的非线性振动和动力响应。Zhang等[6]采用Rayleigh-Ritz方法,分析了具有复杂边界条件功能梯度矩形板的振动特性。Katili等[7]基于有限单元方法研究了功能梯度材料板的自由振动特性。Talha等[8]研究了功能梯度板的随机振动特性。

在现有研究中,对抑制功能梯度材料板振动的研究大多集中在运用速度反馈控制器、机械载荷反馈控制器、LQR控制器、以及自适应模糊控制器等策略进行振动控制,采用鲁棒控制器开展功能梯度悬臂板振动抑制的研究较少。由于建模方法、测量误差或外部扰动影响,智能结构模型总会存在各种不确定性,这将会直接影响振动主动控制的效果,相比其他控制方法,鲁棒控制可以在保证系统稳定的条件下,控制系统对外部扰动具有相当大的稳定裕度。因此本文运用鲁棒控制策略,研究功能梯度悬臂板的振动抑制问题,其创新之处首先在于考虑了系统存在不确定性,其次是引入了全维状态观测器对鲁棒控制策略进行改进,以达到抑制振动的作用。
假设该悬臂板长为a,宽为b,厚为h。在板的上下表面分别贴有厚度为hp的压电片,中间层的Ti-6Al-4V/Aluminum oxide(钛合金/氧化铝)沿厚度方向按体积分数幂律进行梯度分布。考虑气动载荷作用下,附有作动器和传感器的功能梯度悬臂板模型如图1所示。
由于功能梯度板组成材料具有温度依赖性,因此材料有效性能是关于温度和坐标z的函数,具体表示为
Peff(T,z)=PM(T)VM(z)+PC(T)[1-VM(z)]
(1)
式中:Peff为功能梯度材料的有效性能;
VM为Ti-6Al-4V的体积分数;
PC和PM分别为Aluminum oxide和Ti-6Al-4V的热物参数,随温度的变化规律为[24]
P=P0(P-1T-1+1+P1T+P2T2+P3T3)
(2)
式中,P0,P-1,P1,P2和P3为温度相关系数。
VM符合幂率分布形式为
(3)
式中,n(0≤n≤∞)为体积分数指数,在体积分数指数不同的条件下,VM随无量纲厚度的变化由图2给出。
由图2可以发现,随着体积分数指数n的增加,Ti-6Al-4V的体积分数随之下降。当n=0时,悬臂板由Ti-6Al-4V材料组成,而当n趋近于无穷时,悬臂板由Aluminum oxide材料组成。
应用经典层合板理论构建功能梯度复合悬臂板位移场[25]
(4a)
(4b)
w(x,y,z,t)=w0(x,y,t)
(4c)
式中,u0,v0,w0为中面沿x,y,z坐标方向的任意点的位移分量。
FGM悬臂板的位移-应变关系可表示为
(5)
忽略结构的弯扭耦合效应,功能梯度悬臂板的本构方程可表示为
(6)
式中:Qij(z)(i,j=1,2,6)为功能梯度复合材料悬臂板的刚度矩阵;
α11=α22=αf(T,z)为功能梯度复合材料悬臂板的热膨胀系数;
ΔT=T-T0为无热应变T0的参考温度的温度增量。
在忽略热效应和磁效应的情况下,给出压电片的本构方程为
(7a)
Ei=-hklεk+βijDj
(7b)

利用Hamilton原理推导功能梯度悬臂板的运动微分方程可表示为
(8)
式中:K为动能;
U为势能;
δW为外力虚功。
功能梯度悬臂板的动能表示为
(9)
式中,I=ρh+2ρphp,ρ和ρp分别为功能梯度悬臂板和压电片的密度。
FGM悬臂板的应力势能具体表达式为
(10)
假设压电作动器和传感器是各向同性材料,具有相同的几何参数。因此,将式(7)代入压电片的应力势能δUP表达式为[26]
(11)
气动力作用下功能梯度悬臂板的虚功δw表示为[27-28]
(12)

(13)

利用变分法,将式(9)~式(12)代入式(8),可以得到以下5个表达式

(14)

(15)
(16)
(17)

(18)
其中,
式中:上标a和ap均为压电作动器;
上标s和sp均为压电传感器。
考虑到结构以横向振动为主,本文主要研究了功能梯度悬臂板的横向线性振动,为方便求解控制方程,引入如下无量纲变量
(19)
当满足悬臂板边界条件下,给出如下二阶横向振动位移模态函数
w0=w1(t)X1(x)Y1(y)+w2(t)X2(x)Y2(y)
(20)
式中,w1(t)和w2(t)分别为一阶和二阶振动模态的无量纲幅值。
利用Galerkin方法,得到悬臂板的两自由度运动控制方程
(21)
式中:M为系统的质量矩阵;
Z为系统的阻尼矩阵;
K为系统的刚度矩阵;
F为系统外部载荷矩阵。
2.1 压电传感器的建模
压电传感器作为实际控制系统所需的重要元件,可为控制器提供与系统响应相关的控制信号,从而决定控制系统性能,因此有必要对压电传感器进行建模。
定义一个状态变量X,表达式如下
(22)

将悬臂板的两自由度运动控制方程写为状态变量形式
(23)
式中,
式(23)描述了在输入Va(t)作用下系统内部状态的演化。同样运用状态变量X来描述系统输出,即对压电传感器建模,则输出方程
Y=[C]X
(24)
式中:Y为反馈信号;
C为输出系数矩阵。
2.2 鲁棒控制器的设计
本节将设计鲁棒控制器来抑制FGM悬臂板的振动。由于模型中机电耦合的复杂性,控制系统的参数一般存在一定的不确定性。因此,在设计控制系统时,有必要考虑参数不确定性的影响,则控制方程如下
(25)
Y=[C]X
(26)
式中,ΔA和ΔB为系统参数不确定部分,具体表达式如下
(27)
式中:M,E1和E2为具有适当维数的常数矩阵;
G(t)为满足以下条件的时变矩阵函数
G(t)TG(t)≤I
(28)
状态反馈控制器如下所示
Va(t)=-KaX(t)
(29)
式中:X(t)为可测的状态变量;
Ka为状态反馈控制器的反馈增益矩阵。
由于不可能测量所有的状态变量,状态反馈控制器的控制效率将受到影响,为此在反馈封闭系统中引入了全维状态观测器。全维状态观测器的表达式如下[29]
(30)
式中:X(t)0为观测状态变量;
L为观测器增益矩阵。
将全维状态观测器引入到状态反馈控制器中,式(29)可以改写为
Va(t)=-KaX(t)0
(31)
利用状态矢量误差矩阵e=X(t)-X(t)0,由式(25)、式(26)、式(30)得到闭环回路控制方程

(32)
(33)
为实现对悬臂板振动的抑制,需求解式(32)、式(33)中的反馈增益矩阵与观测增益矩阵,为此引入定理1进行求解。
定理1如果存在矩阵Mi(i=1, 2, 3 ),Ni(i=1, 2, 3 )和正定标量εi(i=1~5 ),且满足下列矩阵不等式,则系统的控制方程是渐进稳定的。
(34)
在设计控制系统时,总是需要保证系统是渐近稳定。由于满足定理1的条件等价于系统是渐近稳定的,为此需要运用李雅普诺夫直接法结合引理1来证明该系统满足定理1的条件,且趋于渐进稳定。
证明利用反证法,假设振动控制系统是渐进稳定的,构建一个标量函数,具体表示为
V=eTQe+XTPX
(35)

(36)
引理1对于合适维度的定常矩阵H与R,若有任意ε>0,那么下列不等式成立
(37)
将式(27)、式(32)以及式(33)分别代入式(36),并利用引理1与式(28),可以得到如下不等式矩阵方程
(38)
其中,
ξ=P(A-BKa)+(A-BKa)TP+
P[(ε3+ε5)MMT+ε4BBT]P+
(39)
将式(39)前后乘以P-1,利用Schur补引理,可得如下形式
(40)
证明完毕。
2.3 线性二次型最优控制
LQR是一种最优化控制方法。在最优控制中,反馈控制系统的设计目的是为了使得与需要的系统响应成比例的性能指标最小化。从代数的角度来说,可定义响应的二次型作为性能指标,这样将在很大程度上简化最优化问题。性能指标为
(41)
式中:Q为状态变量的加权矩阵;
R为输入变量的加权矩阵。
结合式(23)、式(24),最优控制的输入表示为
U(t)=-GLX(t)
(42)
式中,GL为反馈增益矩阵,具体表达如下
GL=R-1BTλ(t)
(43)
式中,λ(t)为拉格朗日乘子矢量。
假设:
λ(t)=PX(t)
(44)
可以得到反馈增益矩阵GL=R-1BTP。其中,P为待定矩阵,满足如下Riccati方程
PA+ATP-PBR-1BTP+CTQC=0
(45)
由于可能存在不完全可控的系统状态,二次型性能指标函数无法达到最优。因此需要验证系统的可控性。所谓系统状态完全可控或可控是指对于一个状态变量X属于n维实空间的线性定常系统,若在tf>t0有限的时间内,存在一个能在tf内使n维实空间任意状态X(t0)转移到X(tf)的控制输入U(tf,t0)。系统状态完全可控的条件是如下n维的可控矩Qc阵的秩为n
Qc=[BABA2B…An-1B]
(46)
由Ti-6Al-4V/Aluminum oxide组成的FGM悬臂板,长为a=1 m,宽为b=1 m,板厚为h=0.004 m,压电片厚为hp=0.1 mm。Aluminum oxide材料常数:ρ=3 750 kg/m3,其温度相关系数如表1所示。Ti-6Al-4V材料常数:ρ=4 429 kg/m3其温度相关系数如表2所示。G_1195N压电作动器/传感器材料常数为:Ep=63×109N/m2,ρp=7 600 kg/m3,νp=0.3,β33=6.667×107m/F,h31=h32=-39.37×108V/m,d31=d32=254×10-12m/V。

表1 Aluminum oxide的温度相关系数

表2 Ti-6Al-4V的温度相关系数
3.1 算例对比
在相同参数下,将含压电层的FGM悬臂板与He等研究中的前两阶固有频率进行了比较分析。板的长和宽均为0.4 m,厚度为5 mm,压电片厚度为0.1 mm。悬臂板的前二阶固有频率如表3所示。由表3中可知,本文所得结果与He等的研究结果基本一致。
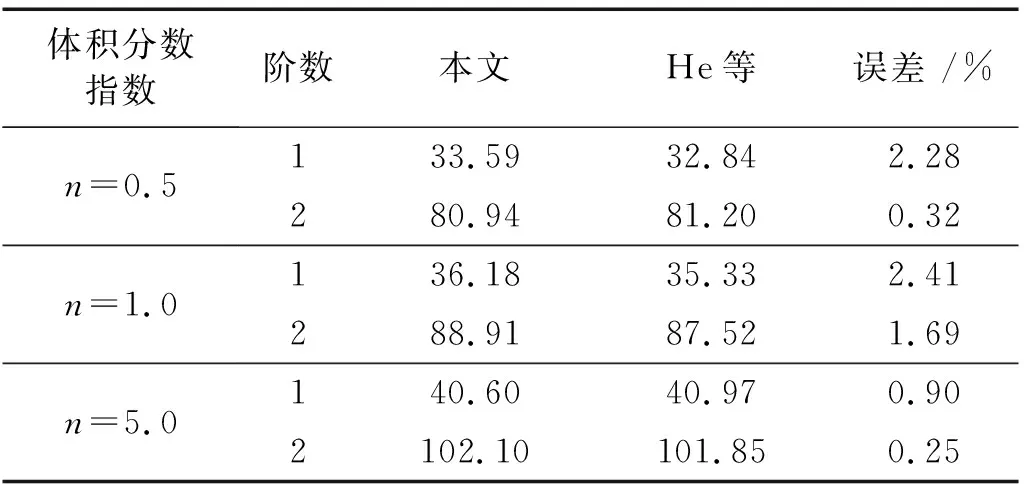
表3 功能梯度悬臂板一阶与二阶固有频率
3.2 不同参数对悬臂固有频率的影响
本节采用数值方法研究体积分数指数和长宽比等不同参数对FGM悬臂板动力学特性的影响。表4给出了不同体积分数指数和长宽比下的FGM悬臂板前两阶无量纲固有频率值。
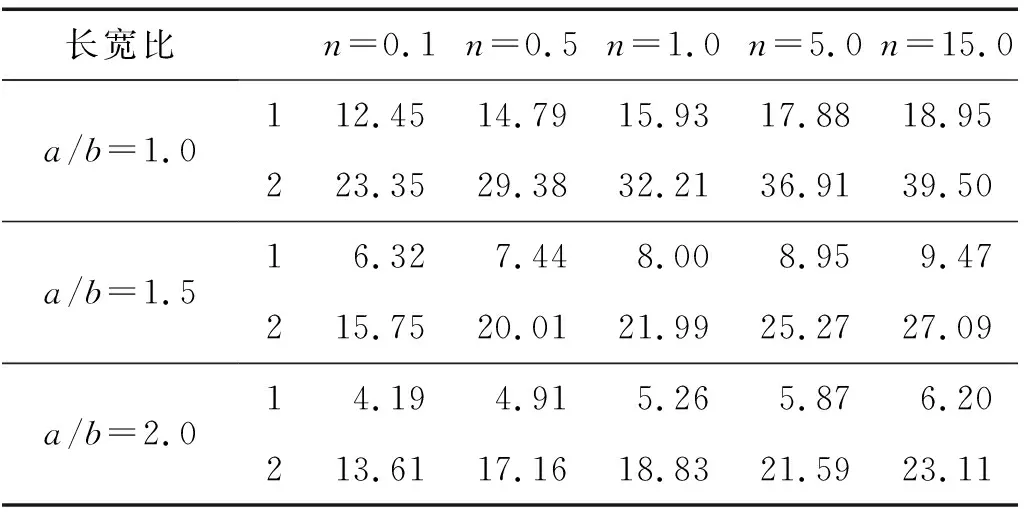
表4 不同体积分数指数和长宽比下FGM悬臂板无量纲固有频率
从表4可以得出,对于不同的体积分数指数下,FGM悬臂板的一阶与二阶无量纲固有频率随体积分数指数的增加而增大。这是由于随着体积分数指数n增大,Aluminum oxide体积分数增高,故悬臂板刚度不断增大,进而FGM悬臂板的一阶与二阶固有频率增加。在同质量情况下,三种不同的长宽比(a/b=1.0,a/b=1.5和a/b=2.0),板的一阶与二阶无量纲固有频率随长宽比的增加而减小,这是因为随着长宽比的增加,结构的刚度减小,进而造成板的固有频率降低。
3.3 不同参数下控制器的有效性
本节在参数不同的条件下,验证鲁棒控制器的有效性。图3和图4分别给出了长宽比a/b=1.0,体积分数指数n=0.5,n=1.0和n=5.0时,功能梯度悬臂板振动控制前后的一阶无量纲时间历程图和在两种控制器下的控制电压图。
从图3可以看出,当体积分数指数为n=0.5,n=1.0和n=5.0,所设计的鲁棒控制与LQR相比,系统衰减到稳定状态所需时间相对较长,控制效果相对较弱。但相比于控制前的一阶模态的无量纲振动幅值,施加控制策略后的无量纲振动幅值在经过一段时间后均呈衰减趋势,直至收敛为零。
从图4可以看出,所设计的鲁棒控制器的控制电压比LQR的控制电压小,即控制作用的成本相对较小,整个控制过程中所消耗的能量相对较低。原因在于采用LQR控制的系统衰减到稳定状态所用的时间短,但是这是以牺牲控制电压为代价的,从而增加控制成本。
综合图3和图4可以得出,在不同体积分数指数下,所设计的控制器能够有效地抑制FGM悬臂板在气动力下的振动幅值。
图5和图6分别给出了体积分数指数n=5,长宽比a/b=0.75,a/b=1.00和a/b=1.50时,功能梯度悬臂板振动控制前后的一阶无量纲时间历程图和在两种控制器下的控制电压图。
从图5和图6可以看出,当长宽比为a/b=0.75,a/b=1.00和a/b=1.50时,所设计的鲁棒控制与LQR相比,控制响应的速率相对较慢,控制效果相对较弱,但所需的输入控制电压相对较小,即控制过程所耗能量相对较低。且相比于控制前一阶模态的无量纲振动幅值,施加控制策略后的无量纲振动幅值在经过一段时间后均呈现收敛趋势,直至收敛为零。即改变结构长宽比,所设计的控制器仍可以有效地抑制FGM悬臂板在气动力下的振动幅值。
FGM材料温度相关性在FGM板振动问题中起重要作用,因此,有必要讨论温度变化的影响。图7和图8分别给出了当体积分数指数n=5,温度T=300 K,T=400 K和T=500 K情况下,控制前后功能梯度悬臂板一阶无量纲时间历程图和在两种控制器下的控制电压图。
从图7和图8可以看出,在温度参数不同的情况下,所设计的控制器相较于LQR,其控制效果较弱但所需要的输入控制电压较少。应用控制策略后的无量纲振幅均呈递减趋势至趋近于零,由此可见,考虑温度影响时,所设计的控制器可以有效地抑制FGM悬臂板在气动力下的振动幅值。
3.4 材料参数不确定下控制器的有效性
本节在考虑材料参数不确定情况下,验证所设计控制器的有效性。假设功能梯度悬臂板与压电层的材料参数值有一定的偏差,其中压电材料的密度ρp、弹性模量Ep和功能梯度悬臂板的弹性模量E1,E2,剪切模量G12均为原材料参数值的90%。
图9和图10分别给出了材料参数不确定情况下功能梯度悬臂板一阶无量纲时间历程图,以及在两种控制器下的控制电压图。
从图9和图10可以看出,当材料参数不确定时,与原系统相比,施加控制鲁棒策略后,系统达到稳定的时间变长,控制速率降低,需要的输入控制电压逐渐减少,系统的控制效果明显减弱,无量纲振幅仍呈衰减趋势,最终收敛至零。而施加LQR后,控制电压无变化,控制器失效。因此,在材料参数不确定情况下,当前设计的鲁棒控制器可以抑制功能梯度悬臂板的振动。
本文提出了一种抑制金属/陶瓷功能梯度悬臂板振动的鲁棒控制方法。运用Hamilton原理和Galerkin方法,推导出功能梯度悬臂板受气动力作用的动力学方程,研究了体积分数指数和长宽比对FGM悬臂板振动特性的影响。算例分析表明,随着体积分数指数的增加,功能梯度悬臂板的一阶与二阶无量纲固有频率增大。当改变结构几何参数时,功能梯度悬臂板的一阶与二阶无量纲固有频率随着板长宽比的增大而减小。
基于得到的动力学方程,构造全维状态观测器,设计鲁棒控制器,形成控制系统闭合回路,从而达到抑制FGM悬臂板振动的目的。在控制策略上,引入LQR,并分析两种控制器的控制效率。同时通过比较施加控制策略前后悬臂板的一阶无量纲时间历程图,发现所提出的控制器在不同体积分数指数、长宽比、温度以及材料参数不确定情况下均能有效抑制结构振动幅值。且所设计的鲁棒控制器的控制电压比LQR的控制电压小,即控制作用的成本相对较小,整个控制过程中所消耗的能量相对较低。
猜你喜欢 无量悬臂压电 摩擦参数对压电执行器振动特性的影响东北大学学报(自然科学版)(2022年6期)2022-07-08不对称截面大悬臂箱梁裂缝成因分析研究交通科技与管理(2022年8期)2022-05-07具有良好温度稳定性的1-3型PZT/epoxy压电复合材料陶瓷学报(2021年4期)2021-10-14压电周期板中耦合禁带影响规律分析北京航空航天大学学报(2021年7期)2021-08-13桥梁施工中悬臂挂篮技术的运用分析建材发展导向(2021年13期)2021-07-28一种压电陶瓷建模与控制的新方法航天返回与遥感(2021年1期)2021-03-16Study on the interaction between the bubble and free surface close to a rigid wall空气动力学学报(2020年4期)2020-11-04刘少白艺术品(2020年8期)2020-10-29挪威最美之奥斯陆图书馆:巨型悬臂“阶梯”房地产导刊(2020年8期)2020-09-11论书绝句·评谢无量(1884—1964)传记文学(2017年9期)2017-09-21本文来源:http://www.zhangdahai.com/shiyongfanwen/qitafanwen/2023/0603/606703.html



